9 Parameter Table
This parameter table shows the most important parameters. Default settings are in bold type. Refer to the drive Technical
Manual for a complete list of parameters.
No. Name Description
A1-03 Initialize Parameters
0: No initialization
1110: User Initialize (parameter values
must be stored using parameter o2-03)
2220: 2-Wire initialization
3330: 3-Wire initialization
5550: oPE04 error reset
8008: Pump
8009: Pump w/ PI
8010: Fan
8011: Fan w/ PI
A1-06 Application Preset
0: General-purpose
8: Pump
9: Pump w/PI
10: Fan
11: Fan w/PI
Note: This parameter is not
settable. It is used as a
monitor only.
b1-01
Frequency Reference
Selection 1
0: Digital operator
1: Analog input terminals
2: MEMOBUS/Modbus communications
3: Option PCB
4: Pulse train input (terminal RP)
b1-02
Run Command
Selection 1
0: Digital operator
1: Digital input terminals
2: MEMOBUS/Modbus communications
3: Option PCB
b1-03
Stopping Method
Selection
0: Ramp to stop
1: Coast to stop
2: DC Injection Braking to stop
3: Coast with timer
b1-04
Reverse Operation
Selection
0: Reverse enabled.
1: Reverse disabled.
C1-01 Acceleration Time 1
Sets the time to accelerate from 0 to
maximum frequency.
C1-02 Deceleration Time 1
Sets the time to decelerate from maximum
frequency to 0.
C2-01
S-Curve Characteristic
at Accel Start
S-curve at acceleration start.
C2-02
S-Curve Characteristic
at Accel End
S-curve at acceleration end.
C2-03
S-Curve Characteristic
at Decel Start
S-curve at deceleration start.
C2-04
S-Curve Characteristic
at Decel End
S-curve at deceleration end.
C6-02
Carrier Frequency
Selection
1: 2.0 kHz
2: 5.0 kHz
3: 8.0 kHz
4: 10.0 kHz
5: 12.5 kHz
6: 15.0 kHz
7: Swing PWM1 (Audible sound 1)
8: Swing PWM2 (Audible sound 2)
9: Swing PWM3 (Audible sound 3)
A: Swing PWM4 (Audible sound 4)
B to E: No setting possible
F: User-defined (determined by C6-03
through C6-05)
d1-01 to
d1-16
Frequency Reference 1
to 16
Sets the frequency reference for the drive.
Setting units are determined by parameter
o1-03.
d1-17
Jog Frequency
Reference
Sets the Jog frequency reference. Setting
units are determined by parameter o1-03.
No. Name Description
d2-01
Frequency Reference
Upper Limit
Sets the frequency reference upper limit as
a percentage of the maximum output
frequency.
d2-02
Frequency Reference
Lower Limit
Sets the frequency reference lower limit as
a percentage of the maximum output
frequency.
E1-03 V/f Pattern Selection
0: 50 Hz, Constant torque 1
1: 60 Hz, Constant torque 2
2: 60 Hz, Constant torque 3 (50 Hz base)
3: 72 Hz, Constant torque 4 (60 Hz base)
4: 50 Hz, Variable torque 1
5: 50 Hz, Variable torque 2
6: 60 Hz, Variable torque 1
7: 60 Hz, Variable torque 2
8: 50 Hz, High starting torque 1
9: 50 Hz, High starting torque 2
A: 60 Hz, High starting torque 3
B: 60 Hz, High starting torque 4
C: 90 Hz (60 Hz base)
D: 120 Hz (60 Hz base)
E: 180 Hz (60 Hz base)
F: Custom V/f, E1-04 through E1-13
settings define the V/f pattern
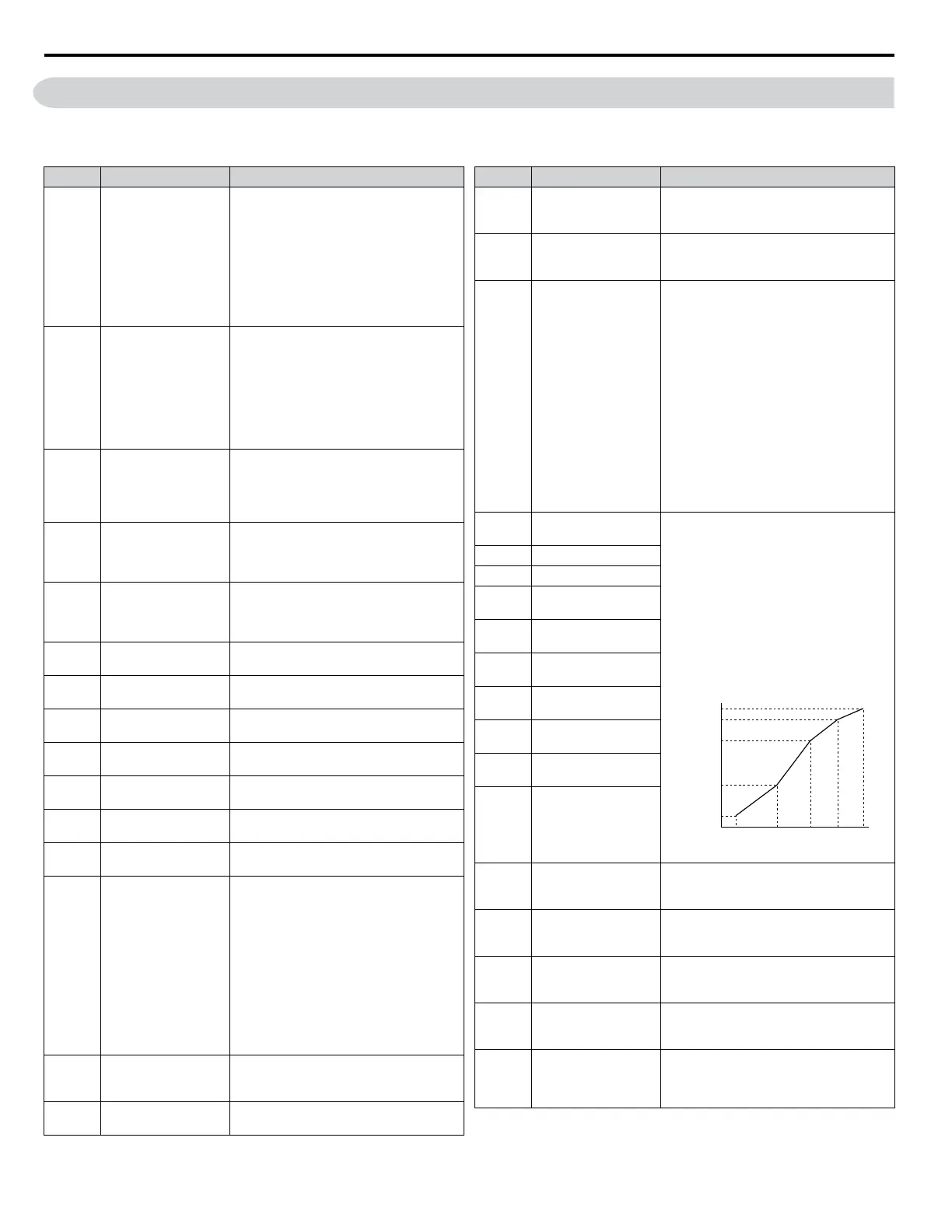
E1-04
Maximum Output
Frequency
Parameters E1-04 and E1-06 to E1-13 can
only be changed when E1-03 is set to F.
To set linear V/f characteristics, set the
same values for E1-07 and E1-09.
In this case, the setting for E1-08 will be
disregarded. Ensure that the five
frequencies are set according to the
following rules to prevent triggering an
oPE10 fault:
E1-09 ≤ E1-07 < E1-06 ≤ E1-11 ≤ E1-04
Setting E1-11 to 0 disables both E1-11 and
E1-12 and the above conditions do not
apply.
Output Voltage (V)
Frequency (Hz)
E1-05
E1-12
E1-13
E1-08
E1-10
E1-09 E1-07 E1-06 E1-11 E1-04
E1-05 Maximum Voltage
E1-06 Base Frequency
E1-07
Middle Output
Frequency
E1-08
Middle Output
Frequency Voltage
E1-09
Minimum Output
Frequency
E1-10
Minimum Output
Frequency Voltage
E1-11
Middle Output
Frequency 2
E1-12
Middle Output
Frequency Voltage 2
E1-13 Base Voltage
E2-01 Motor Rated Current
Sets the motor nameplate full load current
in amps. Automatically set during
Auto-Tuning.
H1-01 to
H1-08
Multi-Function Digital
Input Terminal S1 to
S8 Function Selection
Selects the function of terminals S1 to S8.
H2-01
Multi-Function
Contact Output
(terminal M1-M2)
Sets the function for the relay output
M1-M2.
H2-02
Multi-Function
Contact Output 2
(terminal M3-M4)
Sets the function for the relay output
M3-M4.
H2-03
Terminal M5-M6
function selection
(relay)
Sets the function for the relay output
M5-M6
9 Parameter Table
78
YASKAWA TOEP YAIP1U 04A YASKAWA AC Drive – P1000 6-Phase/12-Pulse Input Installation Manual

 Loading...
Loading...