NoteAction
xx2200000045
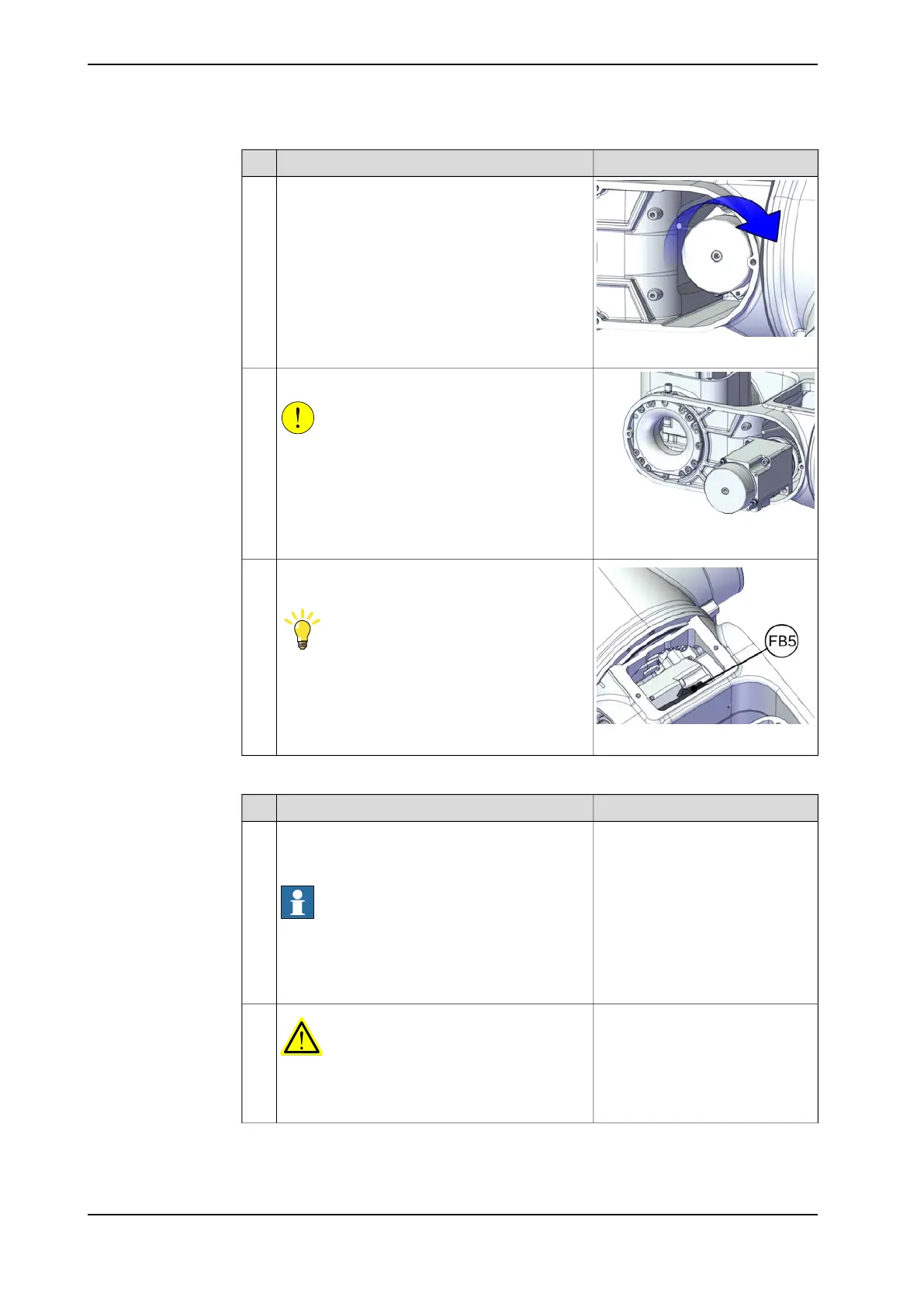
Carefully rotate the motor to make its motor con-
nector to a levelled position.
5
xx2200000046
Carefully lift out the motor.
CAUTION
Be aware of the connector that is still connected!
The motor cannot be removed completely until
the connector is disconnected.
6
xx2200000538
Disconnect the connector.
• FB5
Tip
Take photos of the connector and cable position
before disconnecting them, to have as a reference
when reconnecting.
7
Separating the wrist unit from the axis 3-4 assembly unit
NoteAction
Connect the power supply to axis-3 motor and
release the axis-3 brake to move the axis 3 to -
90°. Then, disconnect the power supply.
Note
The robot is not connected to the controller during
replacement, power must be supplied to the con-
nector R1.MP according to the section Supplying
power to connector R1.MP on page 56.
1
DANGER
Make sure that all supplies for electrical power,
hydraulic pressure, and air pressure are turned
off.
2
Continues on next page
234 Product manual - IRB 1010
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
5 Repair
5.4.4 Replacing the wrist unit
Continued