Removal, gearbox axis 1
Use this procedure to remove gearbox, axis 1.
NoteAction
Decide which calibration routine to use, and
take actions accordingly prior to beginning
the repair procedure.
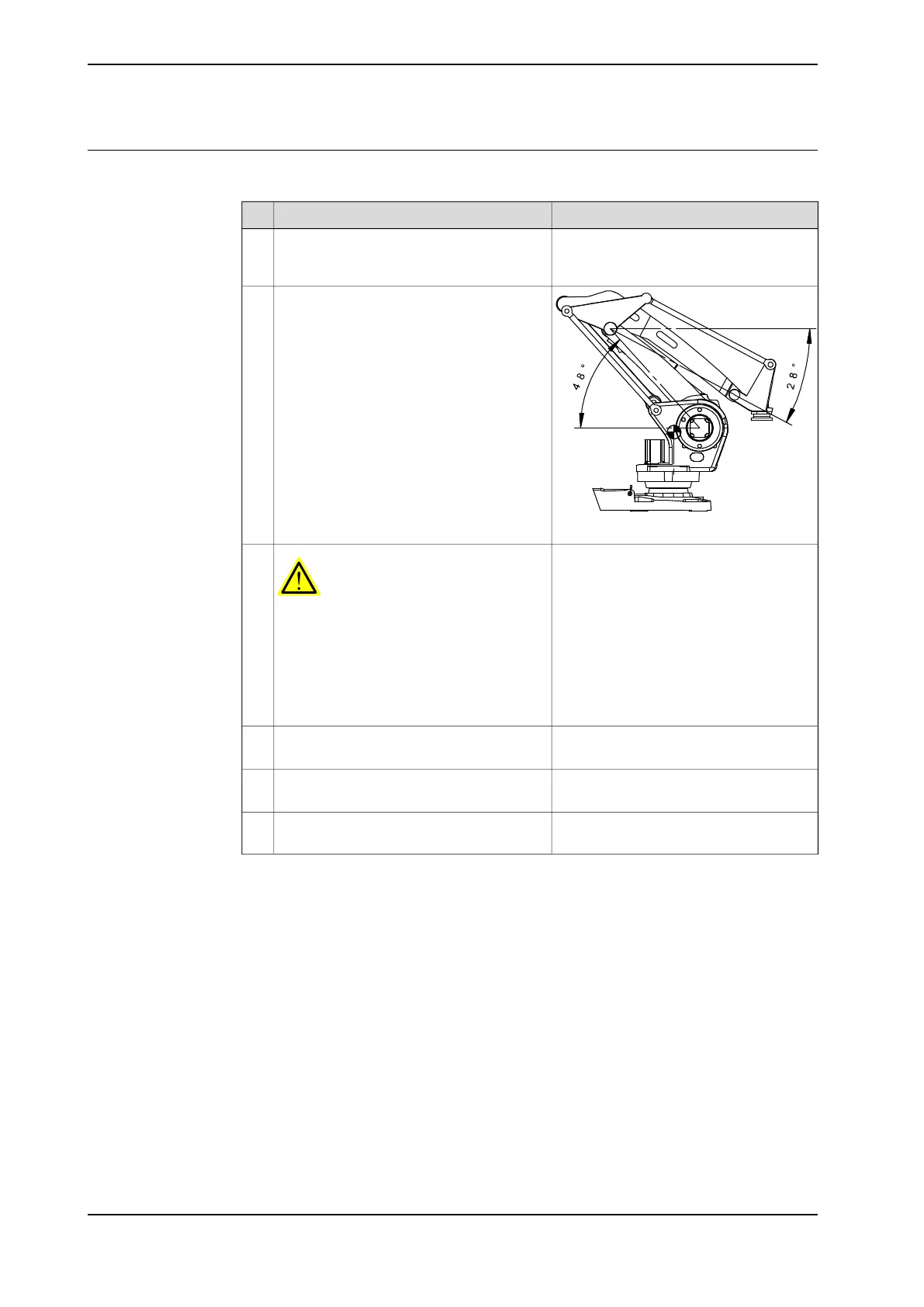
1
xx0500002275
Move the robot to its most stable position,
shown in the figure to the right.
2
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
• air pressure supply
to the robot, before entering the robot
working area.
3
See Changing oil, axis-1 gearbox on
page 123.
Drain the axis 1 gearbox.4
See Replacing the base, including axis 1
gearbox on page 164.
Remove the complete arm system.5
Unfasten the robot base from the foundation
by removing the base attachment screws.
6
Continues on next page
278 Product manual - IRB 660
3HAC025755-001 Revision: W
© Copyright 2006-2020 ABB. All rights reserved.
4 Repair
4.7.1 Replacing the axis 1 gearbox
Continued