DE - 17
CAT2 6 Inbetriebnahme
6.1.1 CAT2 HL
Beachten Sie die vorangegangenen Handlungsschritte:
6.1 CAT2 am Roboter befestigen auf Seite DE-14, Schritt 1 bis Schritt 5
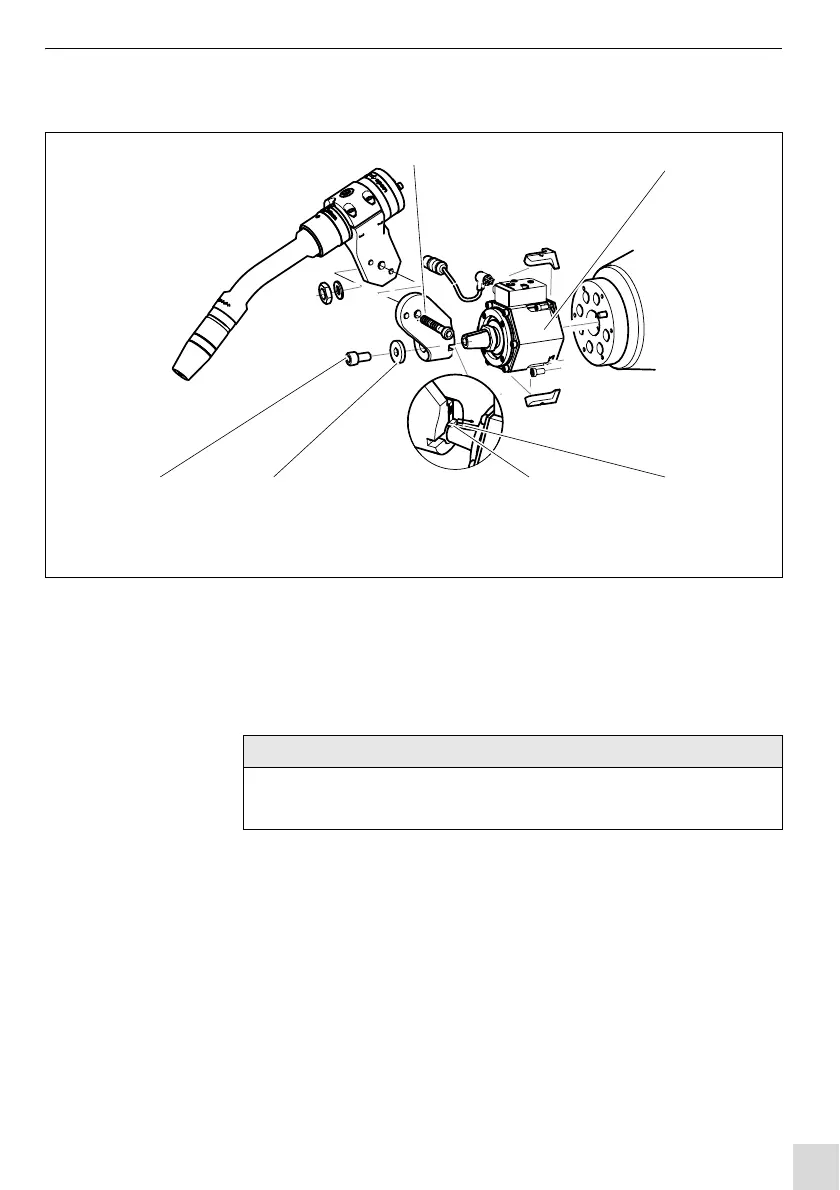
1 Zylinderschraube (6) und Scheibe (5) lösen.
2 Passfeder (4) bis Anschlag in Nut (3) der CAT2 HL (2) stecken.
3 Halter (1) mit Scheibe (5) und Zylinderschraube (6) max.
Anzugsdrehmoment 20 Nm, an CAT2 HL (2) fixieren.
1 Halter
2 CAT2 HL
3 Nut
4 Passfeder
5 Scheibe D=8,4 mm
6 Zylinderschraube M8x16
Abb. 7 CAT2 HL
• Im Halter (1) ist eine Passfeder (4) fixiert. Diese definiert die Nullstellung
der Bauteile zum Roboterarm.