6-6 TUNING THE CONTROL LOOPS
SB1391 Hardware and Setup Guide - Document revision no. 1.14
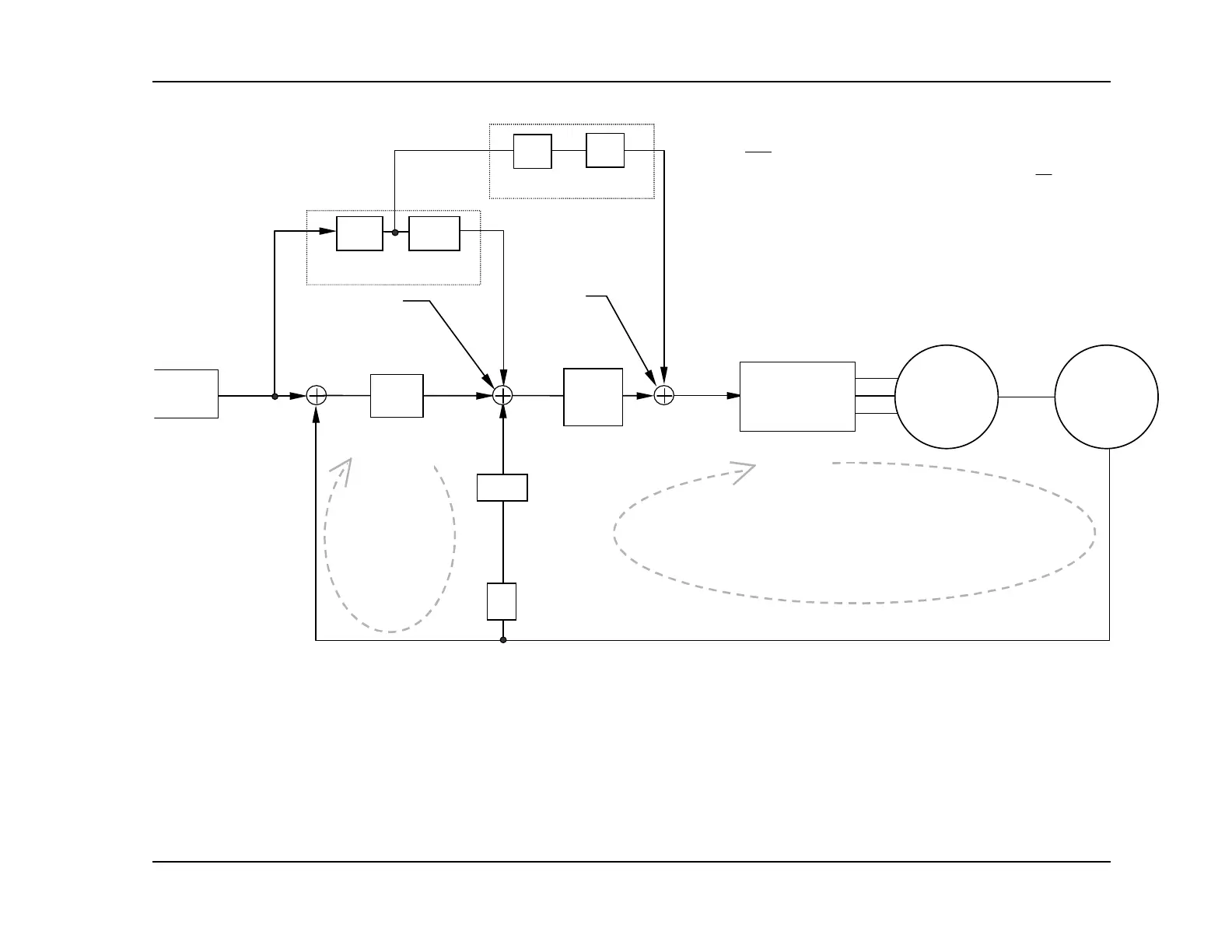
Velocity
feedback
Desired
position
DP
I
c
Current
command
Encoder counts
Velocity feed forward
**D22
*S
Position
filter
+
-
+
+
-
+
Profile
generator
Velocity
error
Current
position
(
CP
)
Key:
* S - Laplace transformer in time domain:
dt
d
S =
**
D22
- Velocity scaling factor (gain)
***
DA
- Bias input
System and control parameters are indicated in
Courier font
.
For example: (
DP
) and
D22
.
Acceleration feed forward
(
AF
)
*S
+
*S
Velocity
filter
POSITION
LOOP
VELOCITY LOOP
Commutation &
power amplifier
M
t
r + l
a
Plant
**D22
Actual
velocity
(
AV
)
Encoder
Position
error
***DA
command
***DA
command
+
+
Velocity
command
GA x 2
GF
FIGURE 6-1 Control algorithm