6-24 TUNING THE CONTROL LOOPS
SB1391 Hardware and Setup Guide - Document revision no. 1.14
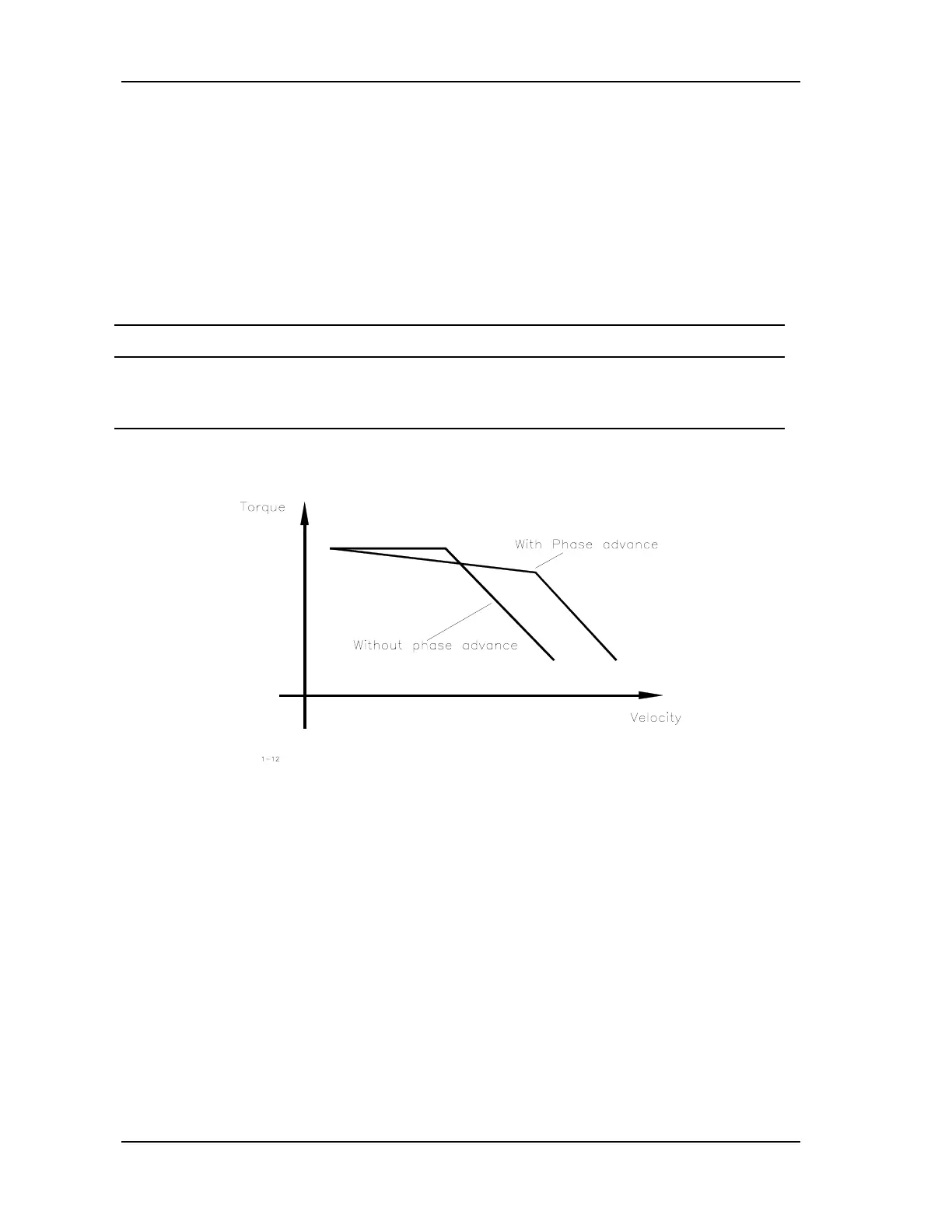
6.8.2. Optimizing Torque At High Speed - Phase Advance
For DC brushless (AC servo/AC synchronous) motor only.
The phase advance feature improves the torque-velocity characteristics at high speed. At high
speed, the actual current lags behind the command. As a result, the motor either needs more
current to produce the required torque, or cannot produce the required torque at all. (FIGURE 6-
18)
Action
1. Set the velocity to 90% of the maximum velocity that is needed.
2. While monitoring the phase current at constant speed, increase PA as long as the
amplitude of the current is reduced.(SXPA##<cr>). If the value of PA is too high, the
control unit might disable the drive.
FIGURE 6-18 DC brushless (AC servo/AC synchronous) motor - velocity vs.
torque
6.9. Dual Loop Control
Some applications involve positioning a load that is driven by a gear, belt and/or screw. If the
driving mechanism (gear etc.) is not accurate enough for the application, a feedback sensor must
be mounted directly on the load to provide precise position information. The common practice is
to use only this device for feedback. This is called single loop control.
Some applications also require good dynamic performance (wide velocity and position
bandwidths), which means very short settling time and a very small dynamic error. For such
applications, single loop control is inadequate. This is because of the low stiffness between the
motor and the load and backlash on the gear.
To achieve good dynamic performance, it is necessary to improve the bandwidth of the velocity
and position loops. The recommended way to do so is to use dual loop control.