Publication 1756-UM001G-EN-P - January 2007
112 Configure Redundancy
ControlLogix Redundancy System Overview
Redundancy requires no additional programming and is transparent to
any devices connected over an EtherNet/IP or ControlNet network. It
uses 1757-SRM modules to maintain communication between the pair
of redundant chassis.
Depending on how you organize your RSLogix 5000 project, outputs
may or may not experience a change in state (bump) during a
switchover.
• During the switchover, outputs that are controlled by the highest
priority task will experience a bumpless switchover. For
example, outputs will not revert to a previous state.
• Outputs in lower priority tasks may experience a change of
state.
The switchover time of a redundant system depends on the type of
failure and the network update time (NUT) of the ControlNet network.
For a NUT of 10 ms, the switchover time is approximately 80...220 ms.
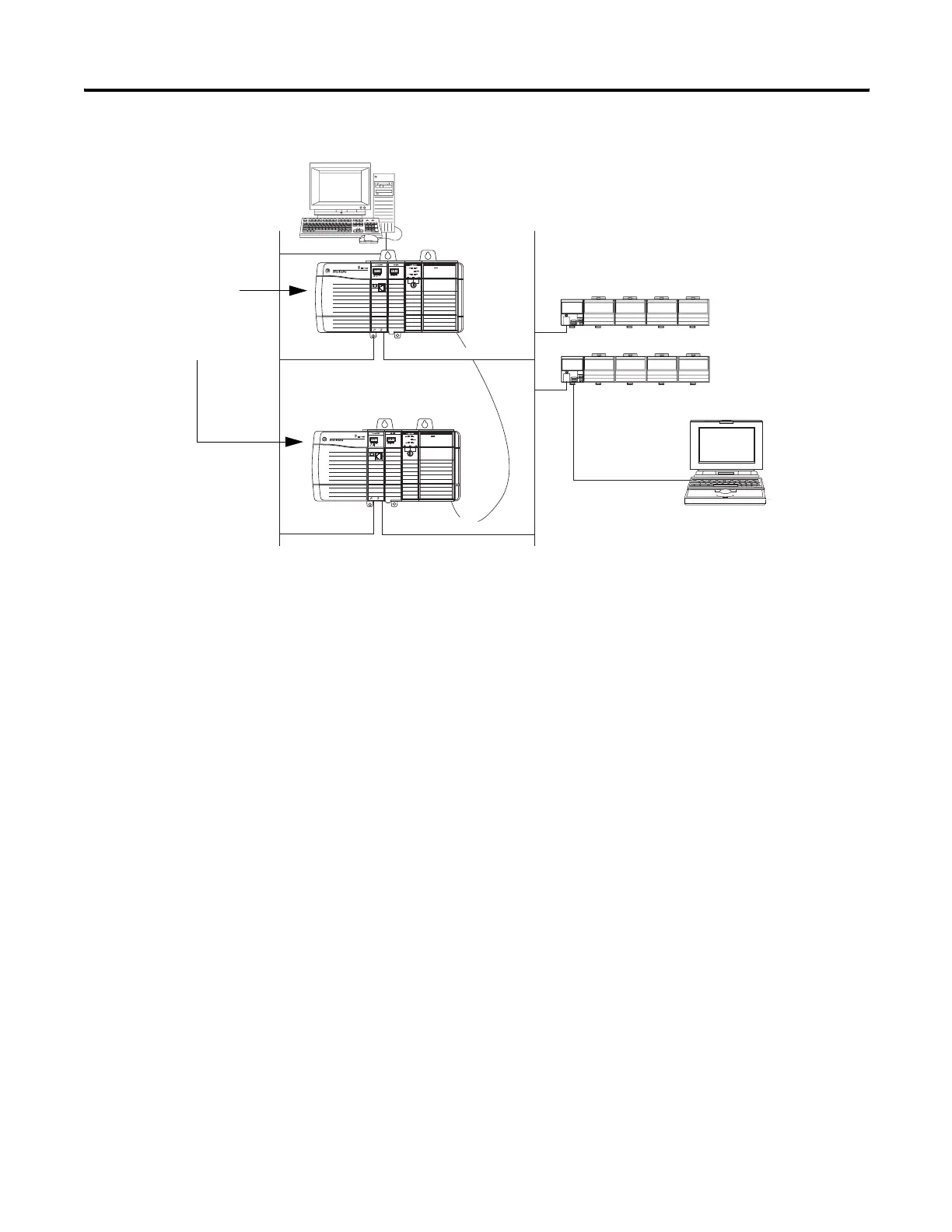
Identical Pair of
ControlLogix Chassis that
Control Your Machine or
Process
At Least Two Other
ControlNet Nodes
Network 2 - ControlNet Network for I/O
Communication
Computer That Is Connected to the Network
Access Port of a Remote Node
Network 1 - EtherNet/IP or
ControlNet network for
HMI Communication
 Loading...
Loading...


