Axpert-Eazy AC Variable Frequency Drive
6-101
6
1) Stop Mode (A304) =0: Ramp down to stop
S1 + S2 +... + Sn + S
D
T
1(sec)
+T
2(sec)
+...+ T
n(sec)
+ T
D(sec)
Average Frequency =
Where,
[F
s(Hz) +
F
1(Hz)
]
x T
1(sec)
S1 =
2
[F
n-1(Hz)
+ F
n(Hz)
] x T
n(sec)
Sn =
2
, n: Step number
F
n(Hz)
x T
D(sec)
S
D
=
2
2) Stop Mode (A304) =1: Coast-to-stop
S1 + S2 +... + Sn
T
1(sec)
+T
2(sec)
+...+ T
n(sec)
Average Frequency =
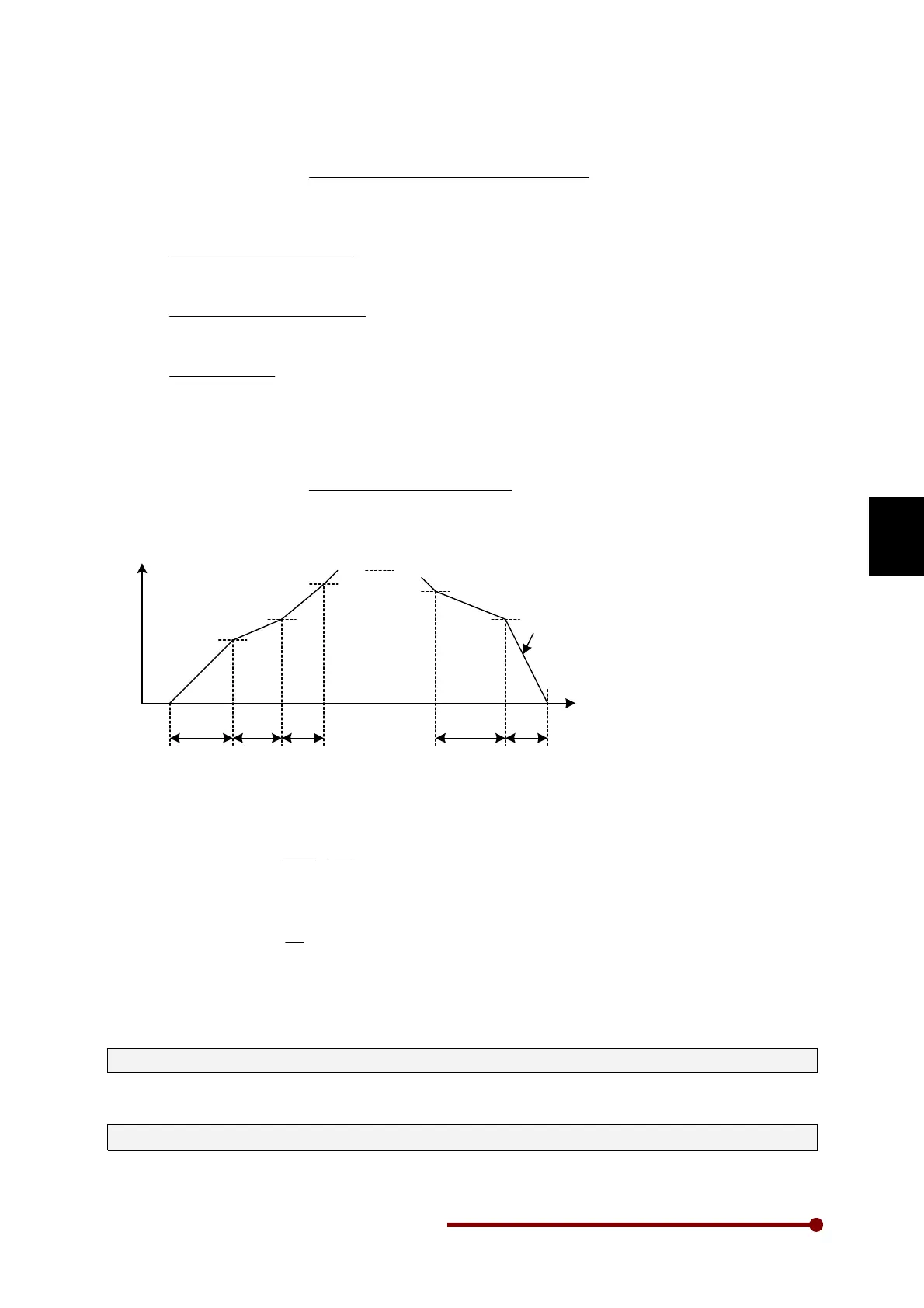
Frequency (speed)
Time
Normal deceleration
cusion
Fs
S1 S2 S3
T1 T2 T3 T7 Td
F1
F2
F3
Fn-1
Fn
Sn SD
It is necessary to set the gain (E106 & E107) in order to display the Hank count correctly. The gain is
obtained using the following formula.
C
R
S
K
G
1
Pole
2
R2Gain ××××= p
R
S
: Spindle radius [yard]
Pole: Motor pole count
G
R
: Gear ratio
1
2
N
N
=
(N
1
: Motor gear count, N
2
: Spindle gear count)
K
C
: Compensation coefficient (Compensate slippage etc.)
The Hank count calculation is continued during operation, however, is reset to zero when the power is
turned OFF.
E101: RSF/ Pattern Run Selection
Select any function from Ring Spinning Frame or Pattern Run function.
E102: Table1 Step Selection
Select the number of steps for table-1 for RSF.