www.baldormotion.com
Mint Keyword Summary C-3MN1901
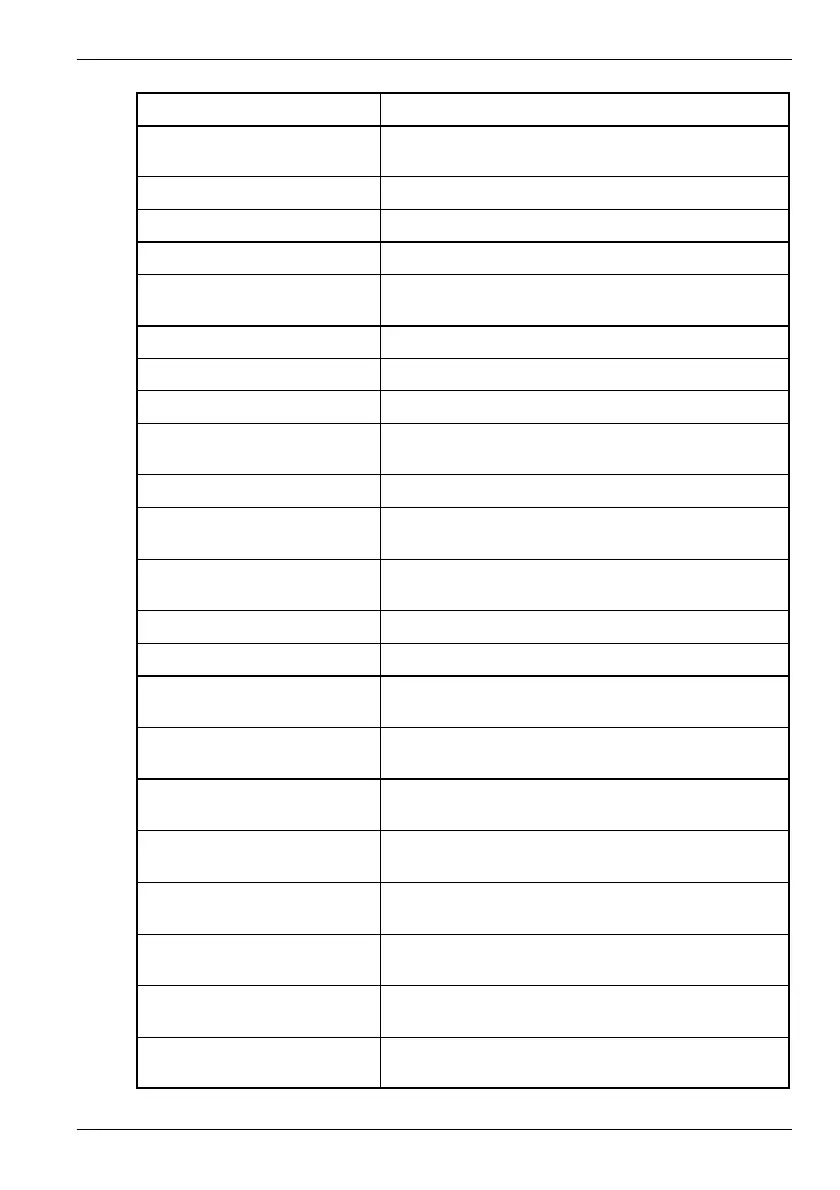
Keyword Description
AUXENCODERZEROPOSITION To read the auxiliary encoder position at the last Z
capture.
AUXENCODERZLATCH To read the state of the auxiliary encoder’s Z latch.
AXISERROR To read back the motion error.
AXISMODE To return the current mode of motion.
AXISPOSENCODER To select the source of the position signal used in dual
encoder feedback systems.
AXISSTATUS To return the current error status from the specified axis.
AXISSTATUSWORD To read the DS402 status word for a remote axis.
AXISWARNING To read or clear present axis warnings.
AXISWARNINGDISABLE Allows individual axis warnings to be enabled and
disabled.
BRIDGECOMPENABLE To enable or disable bridge circuit compensation.
BRIDGEERRORCURRENT To set the current parameter used when compensating
for non-linearities in the drive’s PWM bridge.
BRIDGEERRORVOLTAGE To set the voltage parameter used when compensating
for non-linearities in the drive’s PWM bridge.
Bus To specify which fieldbus is to be used as the default.
BUSBAUD To specify the bus baud rate.
BUSCOMMANDMASK Defines a bit mask for CANopen, DeviceNet and
PROFIBUS Command telegrams.
BUSEVENT Returns the next event in the bus event queue of a
specific bus.
BUSEVENTINFO Returns the additional information associated with a bus
event.
BUSNODE To set or read the node ID used by this node for the
specified bus.
BUSPROCESSDATAIN To configure the drive for the type of process data that
will be received from the master.
BUSPROCESSDATAINDATA-
TYPE
To configure the data type for process data that will be
received from the master .
BUSPROCESSDATAIN-
PARAMETER
To define the associated parameter for items received in
process data telegrams.
BUSPROCESSDATAOUT To configure the type of process data that will be sent by
the drive.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
 Loading...
Loading...
