31
User’s Guide
30
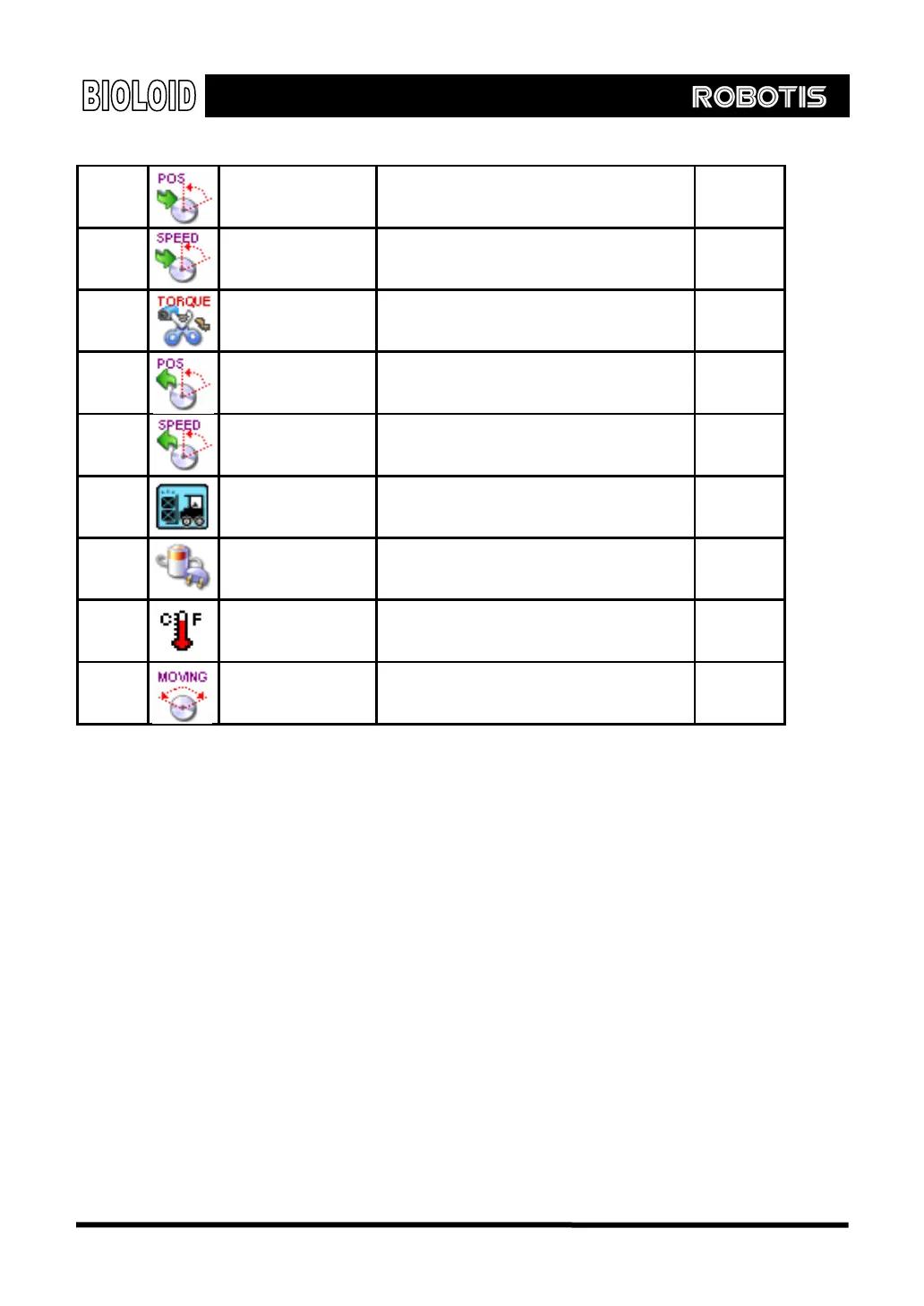
Destination
position
Joint position from 0° to 300° (300°
when 1023)
Input,
Output
32 Speed
Speed when moving (values from
0~1023)
Input,
Output
34 Torque control
Set maximum torque (values are
0~1023)
Input,
Output
36 Current position Value of current position (0~1023) Input
38 Current speed Value of current speed (0~1023) Input
40 Current load Value of external load (0~1023) Input
42 Supplied voltage
Supplied voltage X 10 (12V will be read
as 120)
Input
43
Internal
temperature
The internal temperature of the
Dynamixel (Celsius)
Input
46
Existence of
movement
1 when executing a move command,
otherwise 2
Input