User’s Guide
Appropriate joint position values for moving up the arm.
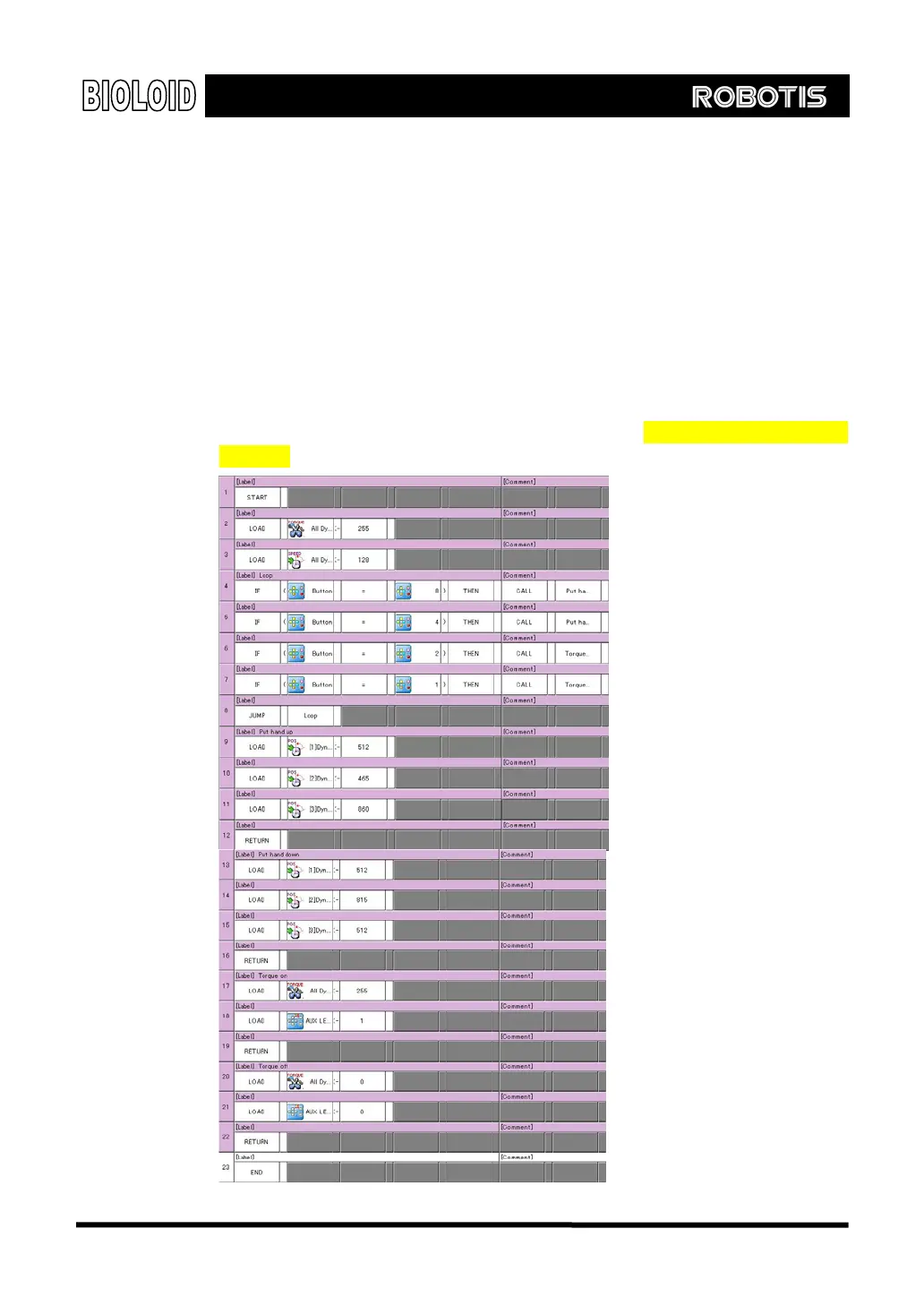
Value of joint position ID = 1: 512
Value of joint position ID = 2: 465
Value of joint position ID = 3: 860
Appropriate joint position values for moving down the arm
Value of joint position ID = 1: 512
Value of joint position ID = 2: 815
Value of joint position ID = 3: 512
Input these values and complete the program. The following figure shows the
source of the finished program. Refer to the “Examples\Example(Robot
Arm).bpg)
42