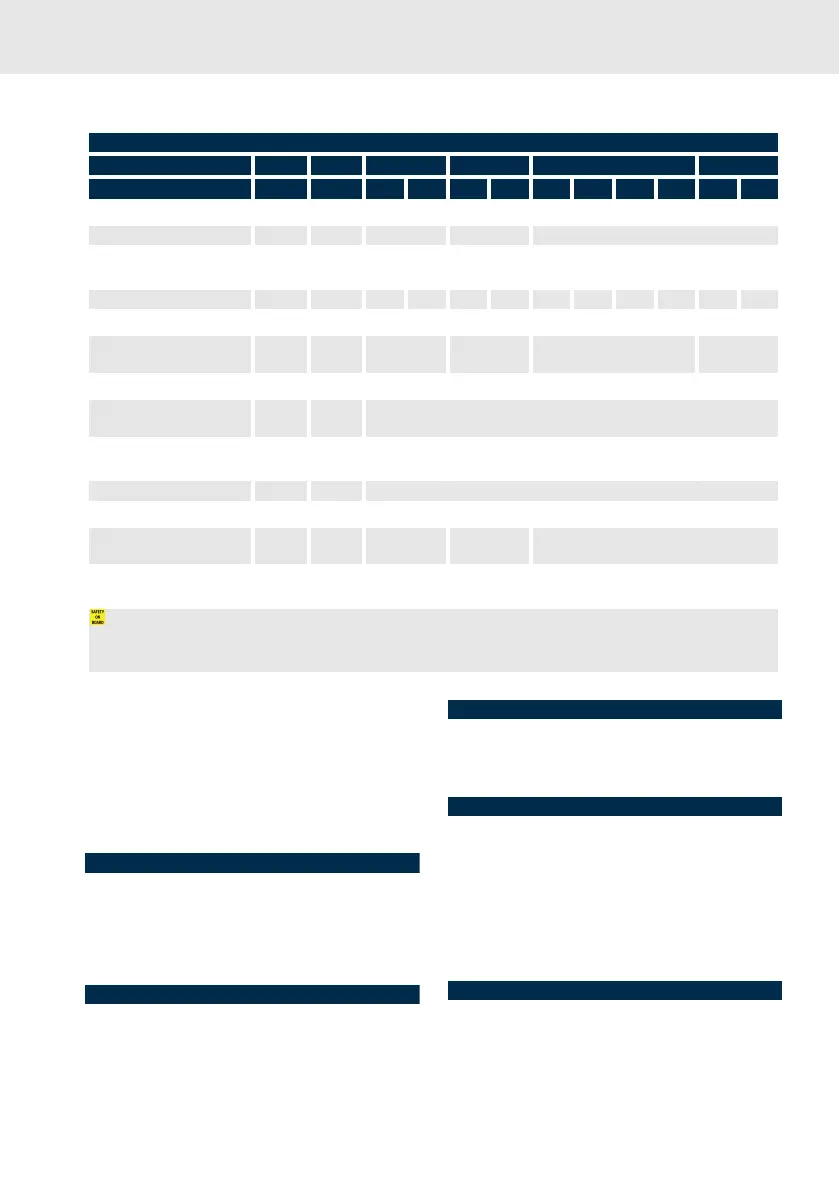
5.2.5 Motor encoder
Technical data motor encoder
BASIC STANDARD ADVANCED HIGH
Designation Symbol Unit AM AS BM BS CM CS HM HS DM DS
Encoder interface - - HIPERFACE® ACURO®-link
Encoder signal periods ~/⑀ - 16 128 -
Functional encoder resolu-
tion (singleturn)
- - 20 bit 24 bit
Distinguishable rotations U
turn
- 4096 1 4,096 1 4,096 1 4,096 1 4,096 1
System accuracy of encoder
1
∢ '' ±520 ±120 ± 36 ± 20
System accuracy typ-
ical/maximum
2)
∢ '' ±360 / ± 520 ±120 ±50 / ± 70 ±20 / ± 30
Encoder output signal V
out
1Vss -
Encoder voltage supply VCC
Encod
er
V 7...12
Encoder max. current con-
sumption
I
Encoder
mA 50 60 130
Functional safety
Safety integrity level - - SIL 2 SIL 3
Performance level
- -
Category 3,
PL d
Category 3, PL e
Position resolution for safe
position
- - 9 bit
1) The installation mechanics can sporadically influence the accuracy of the overall system.
2) Reachable overall system accuracy by taking the installation mechanics into consideration, typical and maximum value.
For more information about Integrated Safety
technology and the requirements to use motors
with encoder systems for Safety technology
applications with IndraDrive, see IndraDrive Inte-
grated Safety Technology “Safe Motion” DOK-
INDRV*-SI3*SMO-VRS-APxx-xx-P.
BASIC
BASIC-Geber “Ax“ uses a capacitive sampling method. Data
output of process data happens analog via SinCos track. Data
output of parameter data (electronic type plate) happens
digitally via Hiperface®-Protocol. The motor temperature is
not transmitted via encoder interface.
STANDARD
STANDARD-Encoder Bx Data output of process data happens
analog via SinCos track. Data output of parameter data (elec-
tronic type plate) happens digitally via Hiperface®-Protocol.
STANDARD
The encoder fulfills the specification for safety technique
according to SIL2 and category 3, PL d. The motor tempera-
ture is not transmitted via encoder interface.
ADVANCED
ADVANCED-Encoder " Cx " / " Hx " use an optical sampling
method. Data output of process and parameter data (elec-
tronic type plate) happens digitally via ACURO®link-Protocol.
The encoder “Cx“ fulfills the specification for safety technique
according to SIL 2 and category 3, PL d. The encoder “Hx“ ful-
fills the specification for safety technique according to SIL 3
and category 3, PL e. The motor temperature is transmitted
digitally.
HIGH
HIGH-Geber " Dx " uses an optical sampling method. Data
output of process and parameter data (electronic type plate)
happens digitally via ACURO®link-Protocol. The encoder ful-
 Loading...
Loading...




