Commander SE User Guide
40 Issue Number 5
The settings for parameter 05 are explained fully on the following pages.
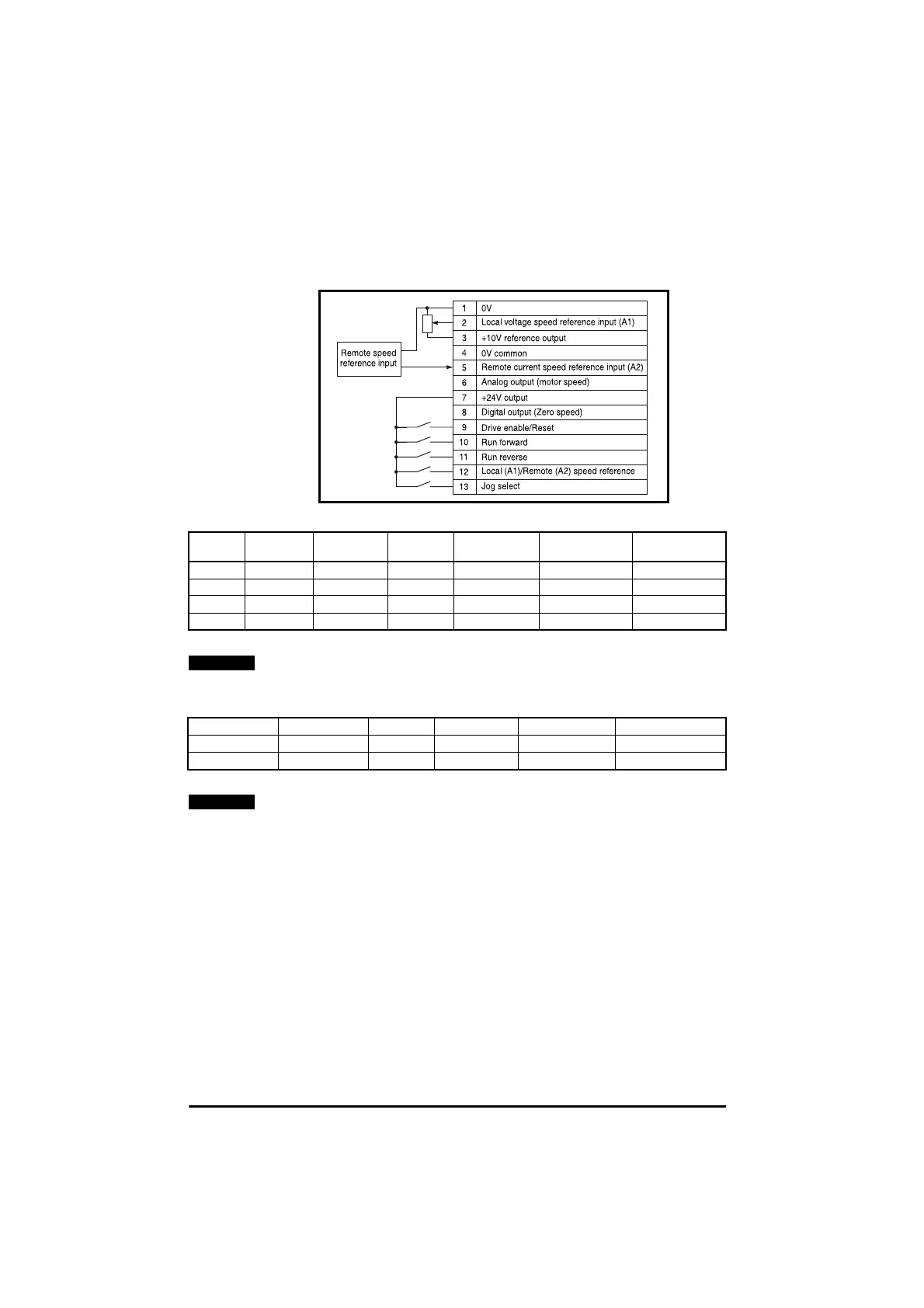
Parameter 5 set to A1.A2
Local voltage (A1) or remote current (A2) speed reference inputs
Figure 6.3 Terminal connections
If the Run Forward and Run Reverse terminals are both closed, the Drive will
stop under the selected ramp and stopping modes.
Jog speed reference (parameter 15)
If jog speed is selected during normal running, the motor will accelerate or
decelerate to the jog speed at the normal acceleration ramp (parameter 03) or
deceleration ramp (parameter 04) and then the jog acceleration and
deceleration ramps (0.2 seconds) will be selected. Once jog has been
selected use the Run Forward or Run Reverse terminals to jog.
Input
Source
Terminal 12 Terminal 13 Enable Run Forward Run Reverse Motor Action
A1 open open closed closed open Run Forward
A1 open open closed open closed Run Reverse
A2 closed open closed closed open Run Forward
A2 closed open closed open closed Run Reverse
NOTE
Terminal 12 Terminal 13 Enable Run Forward Run Reverse Motor Action
open or closed closed closed closed open Jog Forward
open or closed closed closed open closed Jog Reverse
NOTE