As shown on the diagram above, the drive should extend the active state on the HOME output until it stops
on the encoder index. During the tests with an simDrive servo drive the achieved homing accuracy at
2000mm/min speed and encoder’s 10000imp/rev - ranged +/-1 imp. of the encoder.
That detailed homing is useful in practice, because after power failure or E-Stop pressing or any other
incident that causes that we need to re-home, we are sure that there will be no trace in place where the
process was continued.
You should note that at the moment of ride off of the HOME switch, the rotor should be turned about 180
o
to the index point, because - if the index would be very close to the ride off point then homing dispersion
may occur. If the ride off point and the index are to close, you must adjust the HOME switch position. Do
not adjust the encoder!
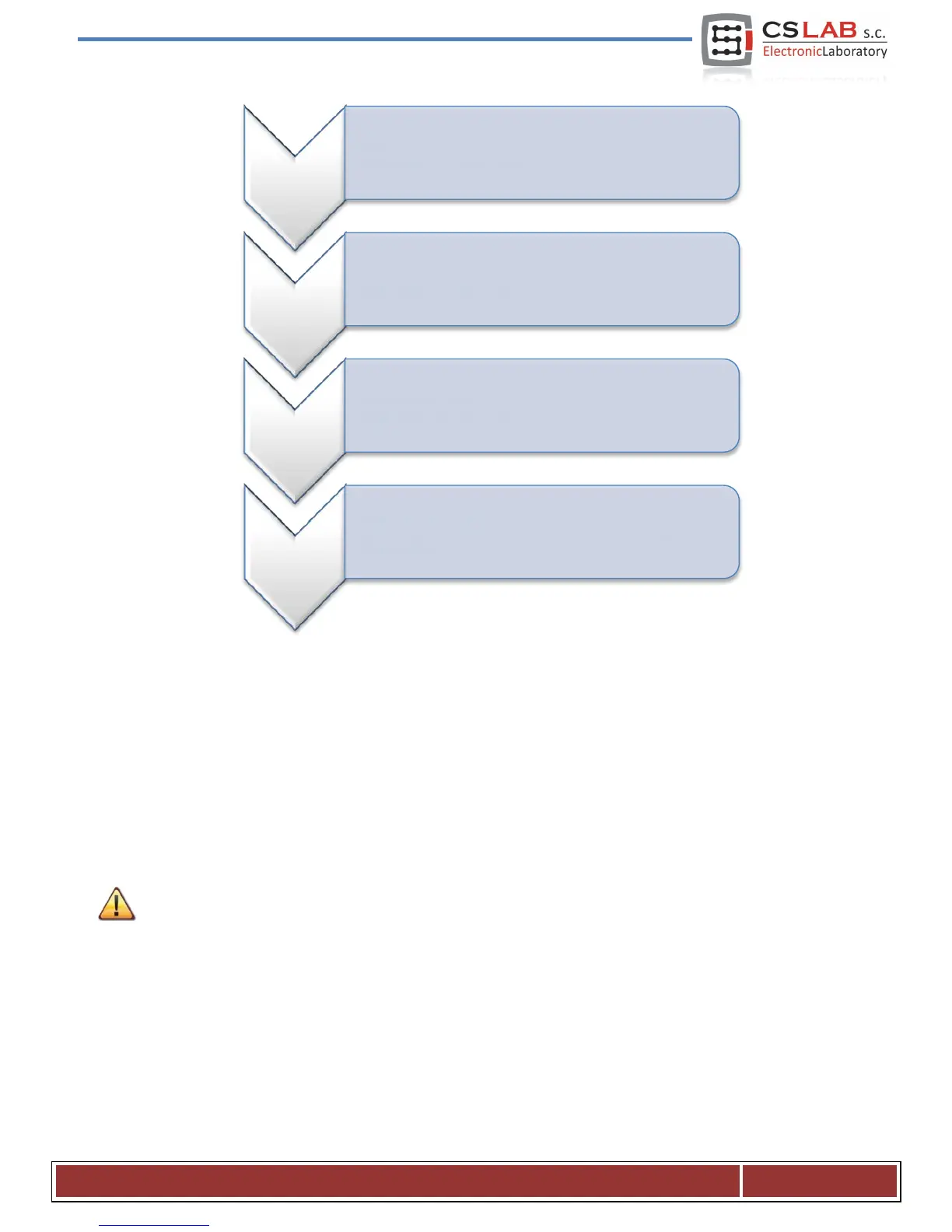
1.Homing start
•HOME switch off -inactive
•HOME output of the drive - inactive
2. Ride on the
HOME sensor
•HOME switch off - activ
•HOME output of the drive - active
3. Ride off of the
HOME sensor HOME
(before the index)
•HOME switch off - inactiv
•HOME output of the drive - activ
4. Ride off of the
HOME sensor (at the
index moment)
•HOME switch off - inactive
•HOME output of the drive - inactive ( in this momen t the CSMIO/IP-M resets
the axis position)
CS- Lab s.c. – CNC CSMIO/IP- M controller
Page 25

 Loading...
Loading...