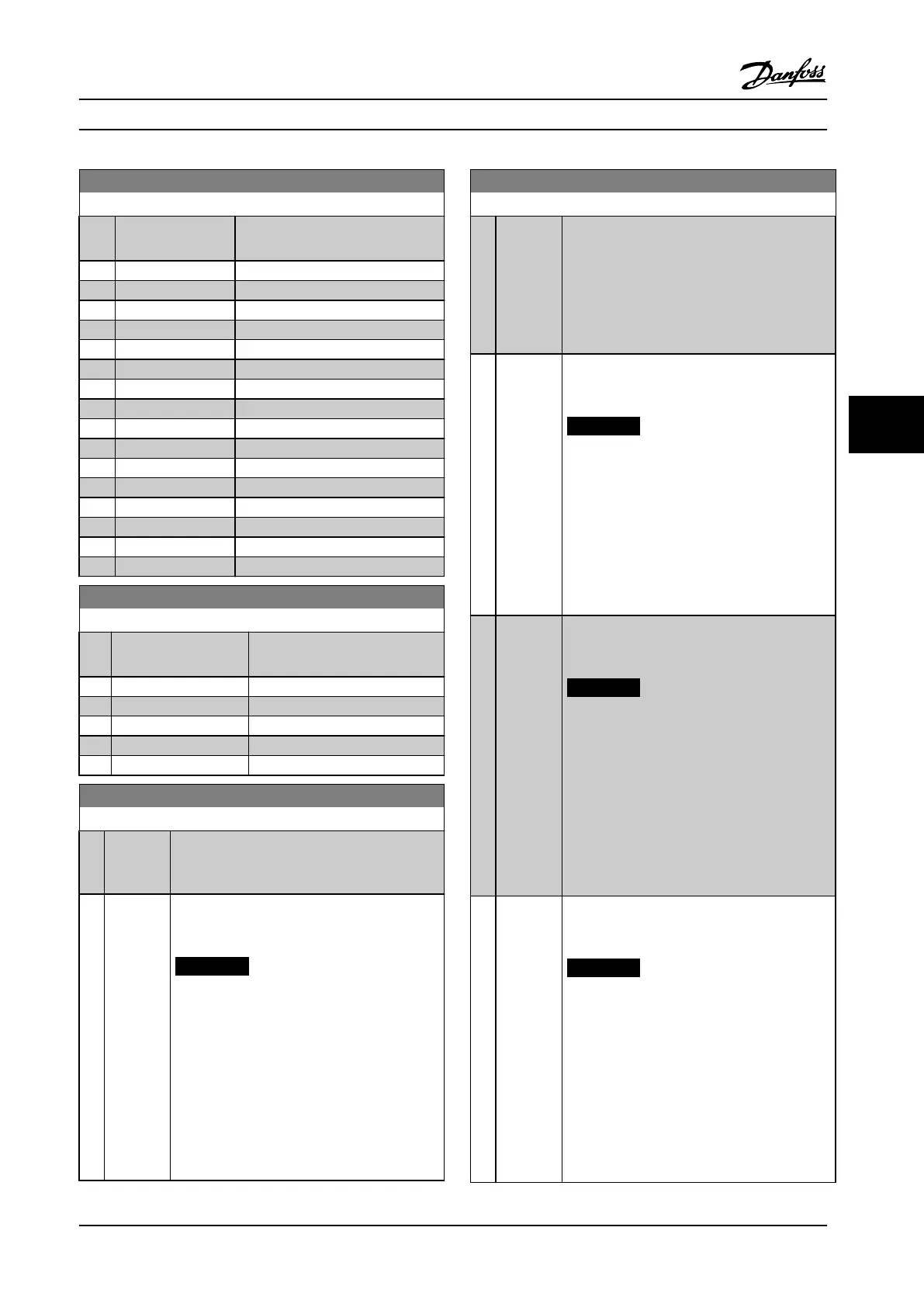
20-06 Feedback 3 Source
Option: Function:
See parameter 20-00 Feedback 1
Source for details.
[0] * No function
[1] Analog Input 53
[2] Analog Input 54
[3] Pulse input 29
[4] Pulse input 33
[7] Analog input X30/11
[8] Analog input X30/12
[9] Analog Input X42/1
[10] Analog Input X42/3
[11] Analog Input X42/5
[15] Analog Input X48/2
[100] Bus feedback 1
[101] Bus feedback 2
[102] Bus feedback 3
[104] Sensorless Flow
[105] Sensorless Pressure
20-07 Feedback 3 Conversion
Option: Function:
See parameter 20-01 Feedback 1
Conversion for details.
[0] * Linear
[1] Square root
[2] Pressure to temperature
[3] Pressure to ow
[4] Velocity to ow
20-20 Feedback Function
Option: Function:
This parameter determines how the 3 possible
feedbacks are used to control the output
frequency of the adjustable frequency drive.
[0] Sum Sets up the PID controller to use the sum of
feedback 1, feedback 2 and feedback 3 as the
feedback.
NOTICE!
Set any unused feedbacks to [0] No
Function in parameter 20-00 Feedback 1
Source, parameter 20-03 Feedback 2
Source, or parameter 20-06 Feedback 3
Source.
The sum of setpoint 1 and any other references
that are enabled (see parameter group 3-1*
References) are used as the PID controller’s
setpoint reference.
20-20 Feedback Function
Option: Function:
[1] Dierence Sets up the PID controller to use the dierence
between feedback 1 and feedback 2 as the
feedback. Feedback 3 is not used with this
selection. Only setpoint 1 is used. The sum of
setpoint 1 and any other references that are
enabled (see parameter group 3-1* References) are
used as the PID controller’s setpoint reference.
[2] Average Sets up the PID Controller to use the average of
feedback 1, feedback 2 and feedback 3 as the
feedback.
NOTICE!
Set any unused feedbacks to [0] No
Function in parameter 20-00 Feedback 1
Source, parameter 20-03 Feedback 2
Source, or parameter 20-06 Feedback 3
Source. The sum of setpoint 1 and any
other references that are enabled (see
parameter group 3-1* References) are used
as the PID controller’s setpoint reference.
[3]
*
Minimum Sets up the PID controller to compare feedback
1, feedback 2 and feedback 3 and uses the
lowest value as the feedback.
NOTICE!
Set any unused feedbacks to [0] No
Function in parameter 20-00 Feedback 1
Source, parameter 20-03 Feedback 2
Source, or parameter 20-06 Feedback 3
Source. Only setpoint 1 is used. The sum
of setpoint 1 and any other references
that are enabled (see parameter group
3-1* References) are used as the PID
controller’s setpoint reference.
[4] Maximum Sets up the PID controller to compare feedback
1, feedback 2 and feedback 3 and use the
highest value as the feedback.
NOTICE!
Set any unused feedbacks to [0] No
Function in parameter 20-00 Feedback 1
Source, parameter 20-03 Feedback 2
Source, or parameter 20-06 Feedback 3
Source.
Only setpoint 1 is used. The sum of setpoint 1
and any other references that are enabled (see
parameter group 3-1* References) are used as the
PID controller’s setpoint reference.
How to Program Instruction Manual
MG11F522 Danfoss A/S © 08/2014 All rights reserved. 101
6 6
 Loading...
Loading...















