This model is used when par. 1-00
Configuration Mode
is set to
Speed closed loop
[1] or
Torque
[2] and par. 1-01
Motor Control Principle
is set to
Flux w/motor feedback
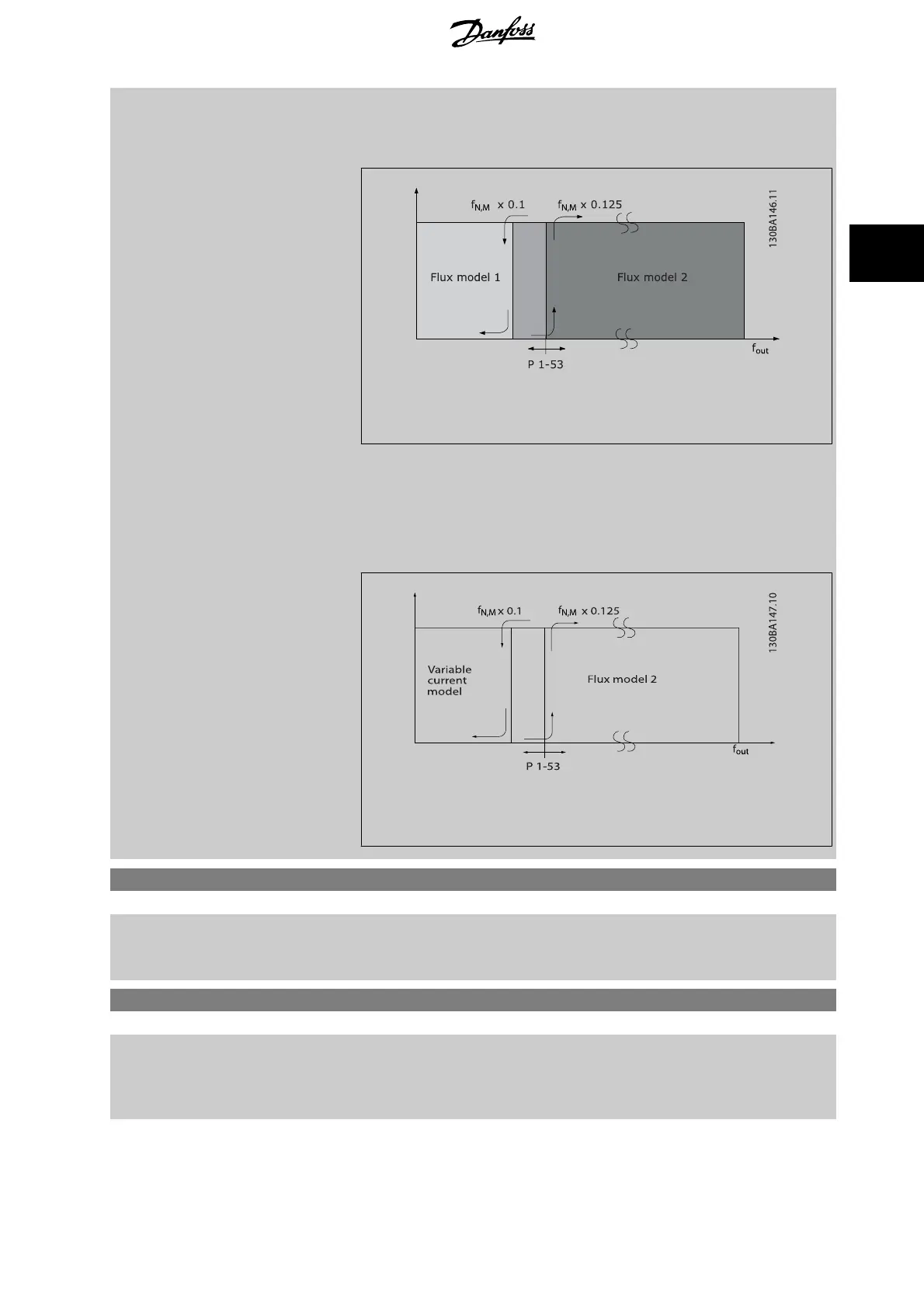
[3]. With this parameter
it is possible to make an adjustment of the shifting point where FC 302 changes between Flux model
1 and Flux model 2, which is useful in some sensitive speed and torque control applications.
Illustration 3.2: Par. 1-00
Configuration Mode
= [1] Speed closed loop or [2] Torque
and par. 1-01
Motor Control Principle
= [3] Flux w/motor feedback
Variable Current - Flux model - Sensorless
This model is used when par. 1-00
Configuration Mode
is set to
Speed open loop
[0] and
par. 1-01
Motor Control Principle
is set to
Flux sensorless
[2].
In speed open loop in flux mode, the speed is determined from the current measurement.
Below f
norm
x 0.1, the frequency converter runs on a Variable Current model. Above f
norm
x 0.125
the frequency converter runs on a Flux model.
Illustration 3.3: par. 1-00
Configuration Mode
= [0] Speed open loop, par. 1-01
Motor
Control Principle
= [2] Flux sensorless
1-54 Voltage reduction in fieldweakening
Range: Function:
0 V* [0 - 100 V] The value of this parameter will reduce the maximal voltage available for the flux of the motor in
fieldweakning, giving more voltage available for torque. Be aware that too high value may give stall
problems at high speed.
1-55 U/f Characteristic - U
Range: Function:
Application
dependent*
[0.0 - 1000.0 V] Enter the voltage at each frequency point to manually form a U/f characteristic matching the motor.
The frequency points are defined in par. 1-56
U/f Characteristic - F
.
This parameter is an array parameter [0-5] and is only accessible when par. 1-01
Motor Control
Principle
is set to
U/f
[0].
FC 300 Programming Guide 3 Parameter descriptions
MG.33.M8.02 - VLT
®
is a registered Danfoss trademark
53
3

 Loading...
Loading...











