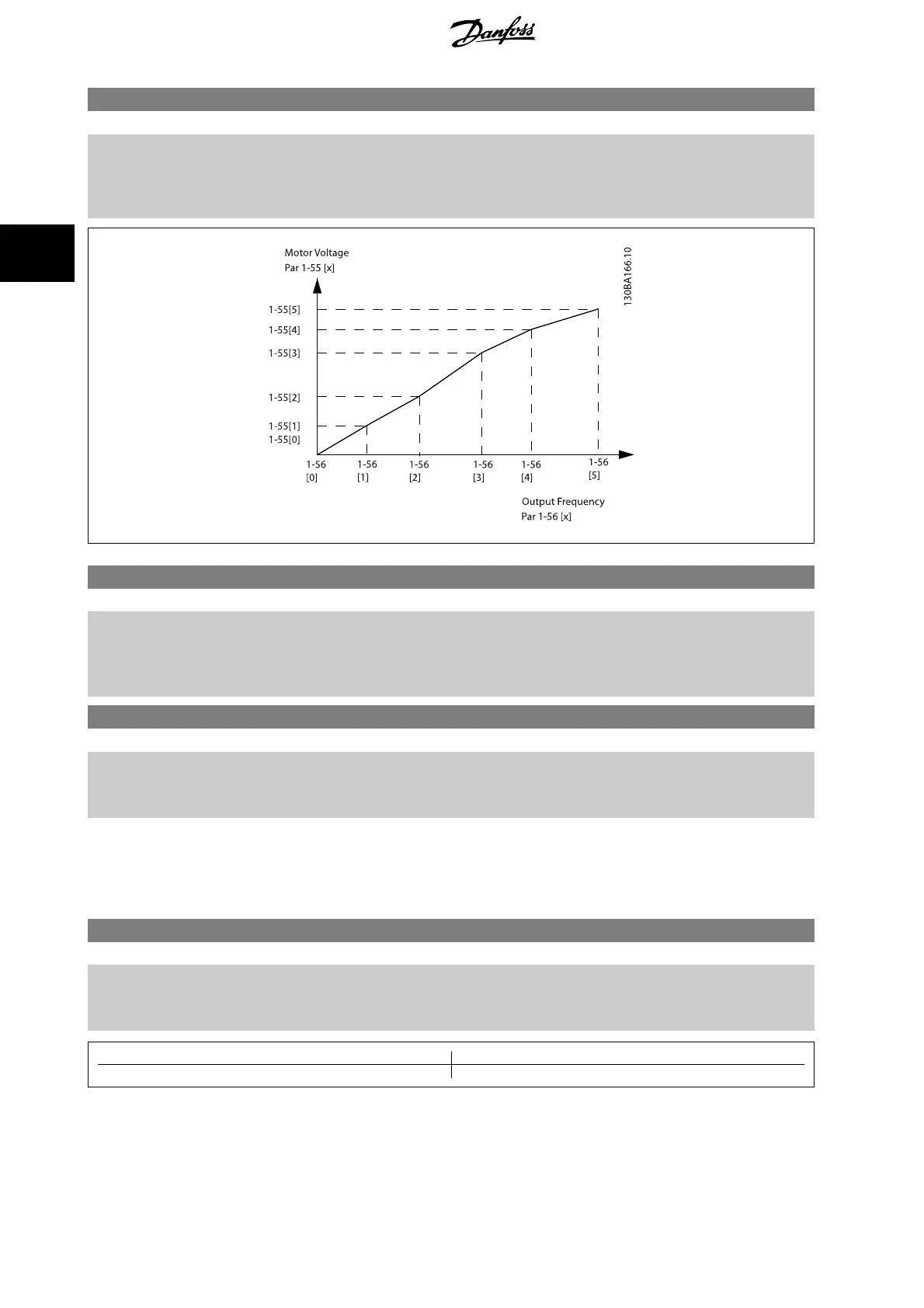
1-56 U/f Characteristic - F
Range: Function:
Application
dependent*
[Application dependant] Enter the frequency points to manually form a U/f-characteristic matching the motor.
The voltage at each point is defined in par. 1-55
U/f Characteristic - U
.
This parameter is an array parameter [0-5] and is only accessible when par. 1-01
Motor Control
Principle
is set to
U/f
[0].
1-58 Flystart Test Pulses Current
Range: Function:
30 %* [0 - 200 %] Control the percentage of the magnetizing current for the pulses used to detect the motor direction.
Reducing this value will reduce the generated torque. 100% means nominal motor current. The
parameter is active when par. 1-73
Flying Start
is enabled. This parameter is only available in
VVC
plus
.
1-59 Flystart Test Pulses Frequency
Range: Function:
200 %* [0 - 500 %] Control the percentage of the frequency for the pulses used to detect the motor direction. Increasing
this value will reduce the generated torque. 100% means 2 times the slip frequency. The parameter
is active when par. 1-73
Flying Start
is enabled. This parameter is only available in VVC
plus
.
3.3.6 1-6* Load Depend. Setting
Parameters for adjusting the load-dependent motor settings.
1-60 Low Speed Load Compensation
Range: Function:
100 %* [0 - 300 %] Enter the % value to compensate voltage in relation to load when the motor is running at low speed
and obtain the optimum U/f characteristic. The motor size determines the frequency range within
which this parameter is active.
Motor size Change over
0.25 kW - 7.5 kW < 10 Hz
3 Parameter descriptions FC 300 Programming Guide
54
MG.33.M8.02 - VLT
®
is a registered Danfoss trademark
3

 Loading...
Loading...











