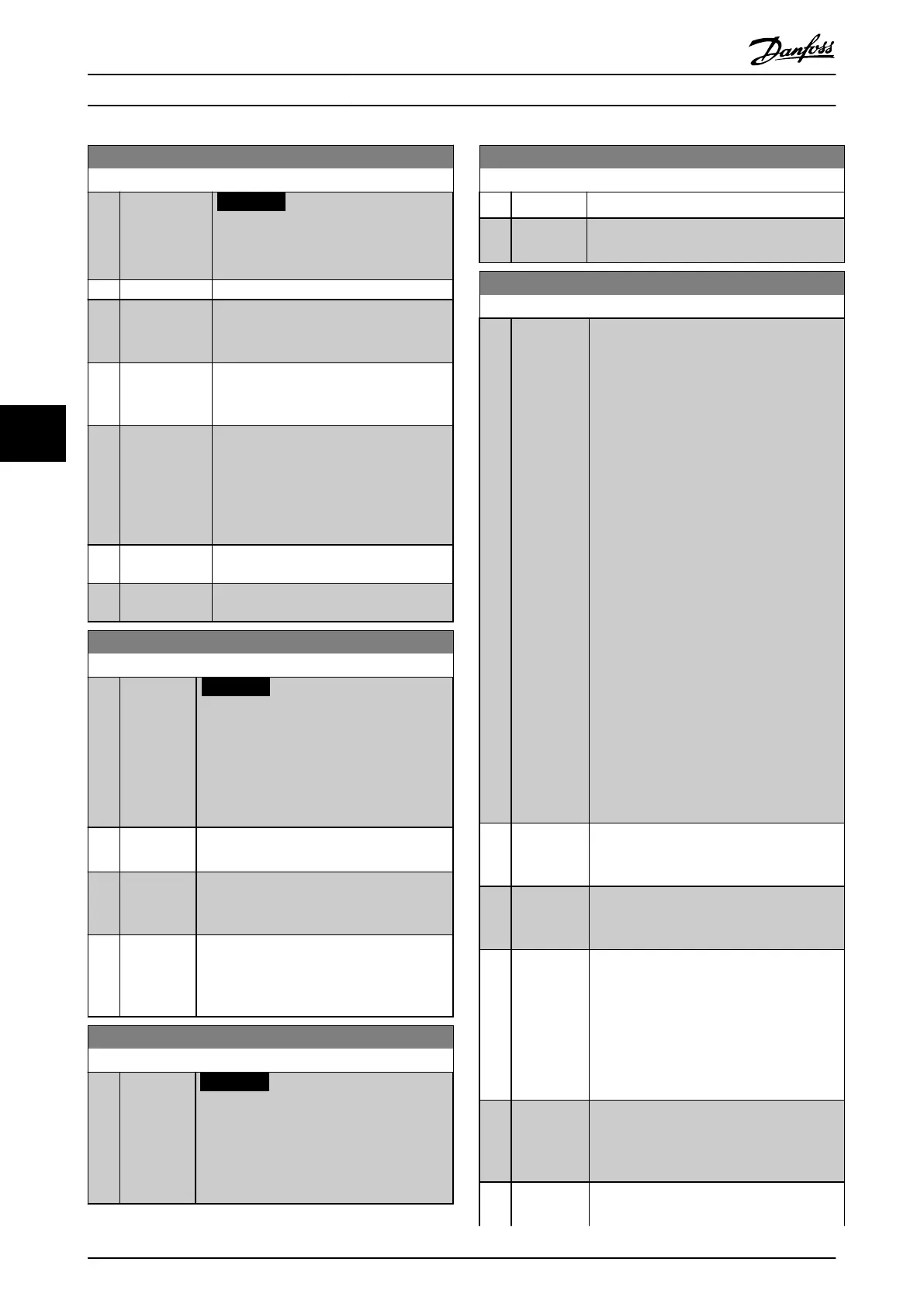
0-50 LCP Copy
Option: Function:
NOTICE
This parameter cannot be adjusted
while the motor is running.
[0] * No copy
[1] All to LCP Copies all parameters in all set-ups from
the frequency converter memory to the
LCP memory.
[2] All from LCP Copies all parameters in all set-ups from
the LCP memory to the frequency
converter memory.
[3] Size indep.
from LCP
Copy only the parameters that are
independent of the motor size. The latter
selection can be used to programme
several frequency converters with the
same function without disturbing motor
data.
[4] File from MCO
to LCP
[5] File from LCP
to MCO
1-03 Torque Characteristics
Option: Function:
NOTICE
This parameter cannot be adjusted
while the motor is running.
Select the torque characteristic required.
VT and AEO are both energy saving
operations.
[0] * Constant
torque
Motor shaft output provides constant torque
under variable speed control.
[1] Variable
torque
Motor shaft output provides variable torque
under variable speed control. Set the variable
torque level in 14-40 VT Level.
[2] Auto Energy
Optim.
Automatically optimises energy consumption
by minimising magnetisation and frequency
via 14-41 AEO Minimum Magnetisation and
14-42 Minimum AEO Frequency.
1-04 Overload Mode
Option: Function:
NOTICE
This parameter cannot be adjusted
while the motor is running.
For oversized motor - allows up to 110% over
torque.
1-04 Overload Mode
Option: Function:
[0] * High torque Allows up to 160% over torque.
[1] Normal
torque
For oversized motor - allows up to 110% over
torque.
1-90 Motor Thermal Protection
Option: Function:
Thermal motor protection can be
implemented using a range of techniques:
•
Via a PTC sensor in the motor
windings connected to one of the
analog or digital inputs (1–93
Thermistor Source). See
chapter 6.1.3.1 PTC Thermistor
Connection.
•
Via a KTY sensor in the motor
winding connected to an analog
input (1-96 KTY Thermistor Resource).
See .
•
Via calculation (ETR = Electronic
Thermal Relay) of the thermal load,
based on the actual load and time.
The calculated thermal load is
compared with the rated motor
current I
M,N
and the rated motor
frequency f
M,N
. See chapter 6.1.3.1 .
•
Via a mechanical thermal switch
(Klixon type). See
chapter 6.1.3.1 ATEX ETR.
For the North American market: The ETR
functions provide class 20 motor overload
protection in accordance with NEC.
[0]
* No
protection
Continuously overloaded motor, when no
warning or trip of the frequency converter is
required.
[1] Thermistor
warning
Activates a warning when the connected
thermistor or KTY-sensor in the motor reacts
in the event of motor overtemperature.
[2] Thermistor
trip
Stops (trips) frequency converter when
connected thermistor or KTY sensor in the
motor reacts in the event of motor overtem-
perature.
The thermistor cut-out value must be > 3 kΩ.
Integrate a thermistor (PTC sensor) in the
motor for winding protection.
[3] ETR warning
1
Calculates the load when set up 1 is active
and activates a warning on the display when
the motor is overloaded. Programme a
warning signal via one of the digital outputs.
[4] ETR trip 1 Calculates the load when set up 1 is active
and stops (trips) frequency converter when
Programming Operating Instructions
52 Danfoss A/S © Rev. 2014-07-29 All rights reserved. MG37A202
66

 Loading...
Loading...







