Chapter 7 Servo Parameters|ASDA-AB Series
7-38
Revision January 2009
P1 - 32
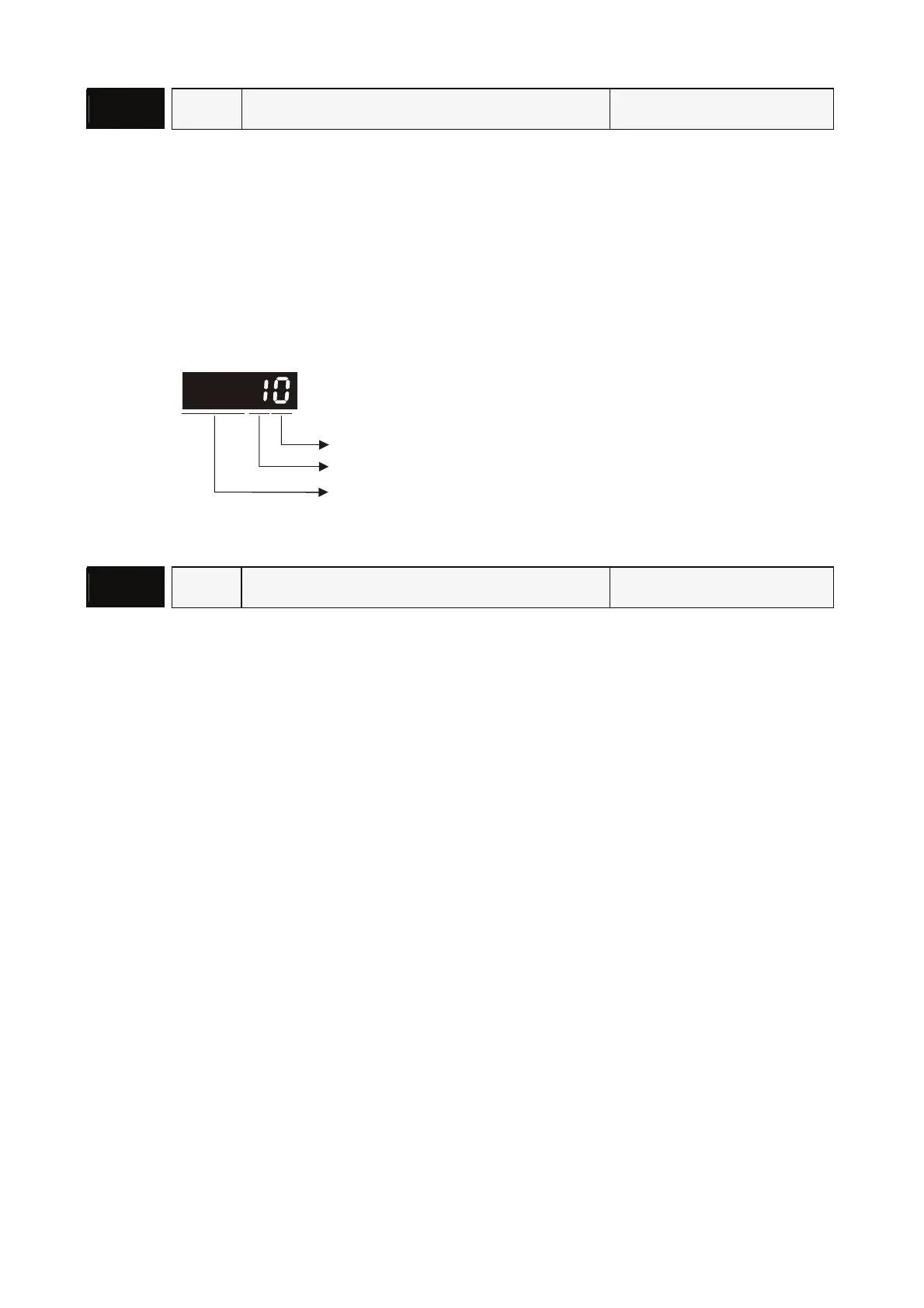
LSTP Motor Stop Mode Selection Communication Addr.: 0120H
Default: 0 Related Section: N/A
Applicable Control Mode: ALL
Unit: N/A
Range: 0 ~ 11
Settings:
This parameter is used to select servo motor stop mode.
When a fault occurs (except for CWL, CCWL, EMGS and serial communication error), it is used
to set servo motor stop mode.
not used
B
• A=0: Stop instantly
• A=1: Decelerate to stop
• B=0: Use dynamic brake when Servo Off (when the
servo drive is Off).
• B=1:
llow servo motor to coast to stop when Servo
Off (when the servo drive is Off).
P1 - 33●
POSS Position Control Mode (Pr) Communication Addr.: 0121H
Default: 0 Related Section:
Applicable Control Mode: Pr Section 6.2.2
Unit: N/A
Range: 0 ~ 6
Settings:
This parameter determines the specific type of position control for Pr mode with the internal
INDEX number. (Please refer to Chapter 6 and Chapter 12 for explanation and examples.)
0: Absolute positioning mode
1: Incremental positioning mode
2: Forward operation feed step mode
3: Reverse operation feed step mode
4: Shortest path feed step mode
5: Continuous auto-running positioning mode (Absolute)
6: Continuous auto-running positioning mode (Incremental)
7: One-cycle auto-running positioning mode (Absolute)
8: One-cycle auto-running positioning mode (Incremental)
This function when changed from absolute to incremental or incremental to absolute only gets
registered in the drive after switching power off and on.

 Loading...
Loading...
