Introduction of E-Cam Operation ASDA Series Application Note
2-46 March, 2015
2.8 Simultaneously Using E-Cam Function and PR command
When servo is working at the command of E-Cam and a PR with incremental position command
is triggered at the same time, E-Cam command and PR command will be overlapped. Both
commands will change the output of the servo.
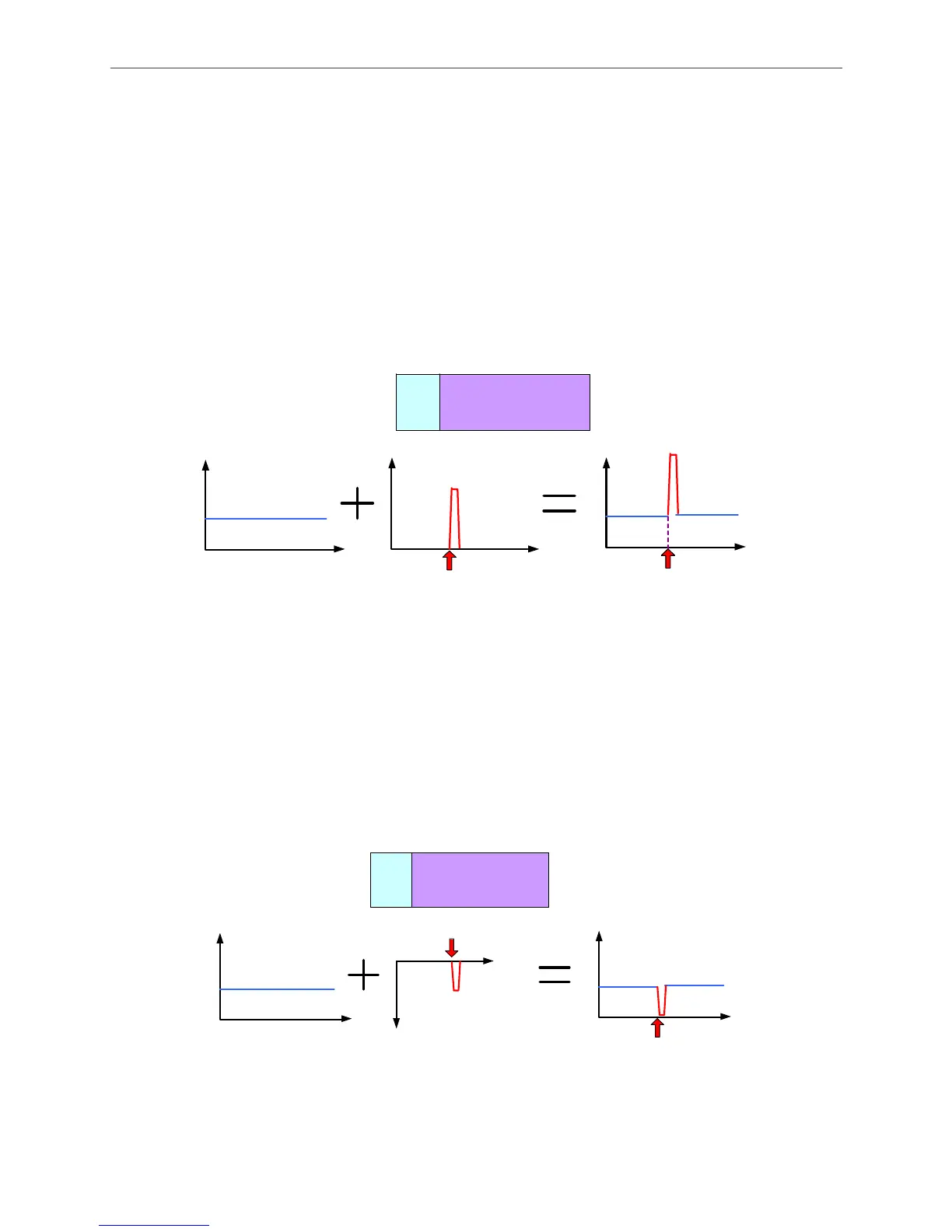
See Figure 2.64. When E-Cam is operating, if triggering a PR command of which target speed is
higher than E-Cam speed, the motor will overlap the PR command with E-Cam command. For
example, a motor operates at 1000 rpm under the control of E-Cam, when a PR which target
speed is 2000 rpm is triggered, motor will not stop operating at 3000 rpm until the PR command
is completed. Then it will switch back to 1000 rpm which is specified by E-Cam command.
PR
#A
Position (2 )
D= 0
ms,
S= 2000 rpm
5000 PUU, INC
PR
#A
Position (2 )
D= 0
ms,
S= 2000 rpm
5000 PUU, INC
PR
#A
Target speed is higher than E-Cam speed
Time
Speed
Time Time
ECAM
00
0
PR
ECAM + PR
(Same Direction)
Speed
Speed
Position (2)
D = 0 ms, S = 2000 rpm
5000 PUU, INC
Figure 2.64 E-Cam Command plus PR command
See Figure 2.65. If triggering an incremental PR command which target speed is slower than
E-Cam speed and operate in reverse direction when E-Cam is operating, the motor will
counterbalance the PR and E-Cam command when PR is operating. For example, if a motor is
operating at 1000 rpm under the E-Cam’s command, when a PR command which target speed is
200 rpm at reverse direction is triggered, motor will keep operating at 800 rpm until this PR
command is completed. Then, it will switch back to 1000 rpm under E-Cam’s command.
PR
#B
Position (2)
D=
0 ms , S= 200 rpm
- 5000 PUU, INC
PR
#B
Position (2)
D=
0 ms , S= 200 rpm
- 5000 PUU, INC
PR
#B
Target speed is slower than E-Cam speed
Speed
Time
Speed
Speed
Time
Time
0
0
0
PR
ECAM
ECAM + PR
(Reverse Direction)
Position (2)
D = 0 ms, S = 200 rpm
-5000 PUU, INC
Figure 2.65 E-Cam command Counterbalances the PR Command
The method of overlapping E-Cam command and PR command is very useful. This method can
be used when desire to modify the speed or phase when E-Cam is operating. In Figure 2.66,

 Loading...
Loading...




