Application Examples ASDA Series Application Note
3-96 March, 2015
3.7.3.2 System configuration
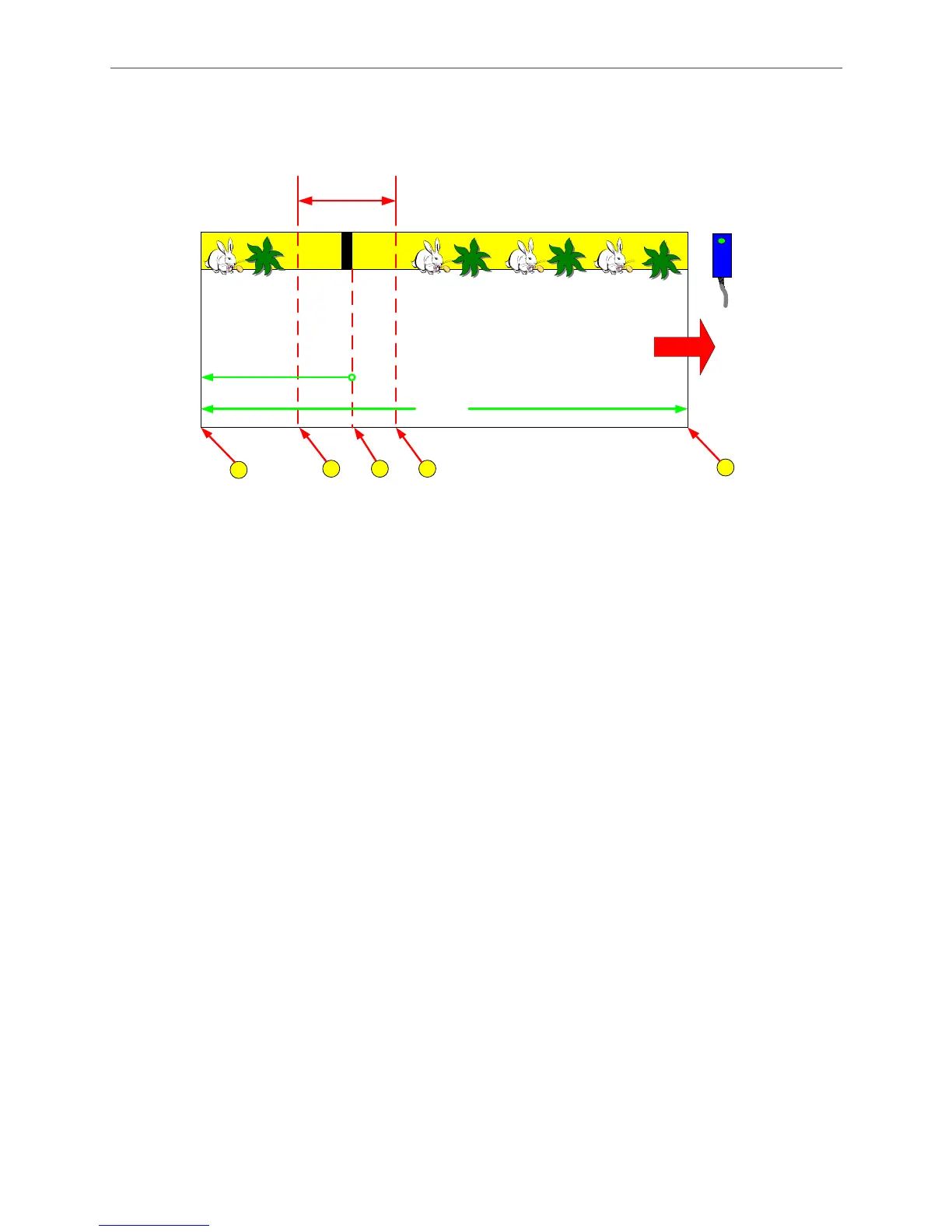
Figure 3.7.1 is the description of system plan.
234
5
1
The section
that CAP
function is
enabled
Moving
distance
The moving distance
after being triggered
Start position
End position
Moving
direction
0 PUU
100,000
PUU
80,000
PUU
70,000
PUU
60,000
PUU
30,000 PUU
Figure 3.7.1 System plan
First, set data array address 50 to 60000, which is the start position of mark printing. Then,
set data array address 51 to 80000, which is the end position. COMPARE function will use
these two addresses for mark detection.
The description of mark 1 ~ 5 in Figure 3.7.1 is shown below:
1. Reset the coordinate to 0 and initialize the COMPARE function (The COMPARE point
refer to data array address 50 = 50 = 60000 PUU). Then, setup the moving distance
of absolute command to 100000 PUU.
2. When motor moves to 60000 PUU, the COMPARE function will be enabled (DO4 is
ON). Setup and enable CAPTURE function and initialize another COMPARE function.
This will refer to the content 80000 PUU of data array address 51.
3. If CAPTURE reads the mark in printing section, the system will disable COMPARE
function and call PR to execute CAP so as to interrupt the original command. This will
enable the motor to move another 30000 PUU starting from the mark, which is the
mark reading function of each cycle. If CAPTURE is unable to read the mark, the
original motion command will be executed.
4. When the position is at 80000 PUU, if the sensor does not detect the mark,
CAPTURE will not be triggered. Then, the COMPARE function will be enabled and
call another PR to disable CAPTURE function. It means no mark will be read after this
position.
5. No matter the mark is read or not, it will go to this position as the end position for a
cycle.

 Loading...
Loading...




