Application Examples ASDA Series Application Note
3-64 March, 2015
3.5 Application to Gantry
3.5.1 Introduction
This chapter explains the gantry setting and how gantry works when it is used on Delta ASDA-A2
series products. Users may increase or reduce control signals based on their needs. For other
description of functions and commands, please refer to user manuals of Delta servo drive.
3.5.2 How Gantry works and the System Structure
3.5.2.1 How does gantry work?
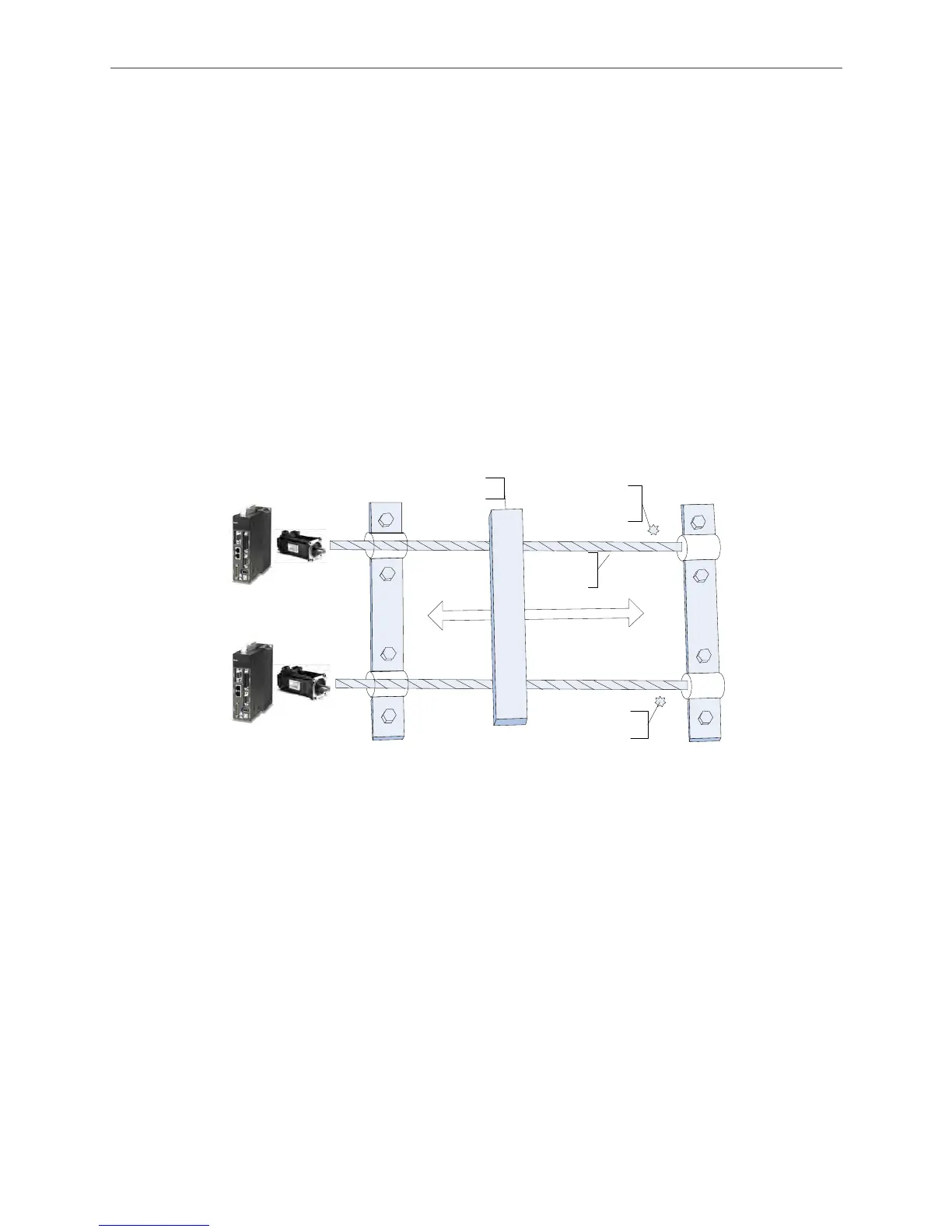
Concerning the gantry control, two axes that control the platform must move with the same
speed. A considerable deviation of moving speed between two axes might damage the
mechanism. Thus, synchronizing the motion of two axes is the first priority. See the
demonstration in Figure 3.5.1.
Position
sensor
Position
sensor
Moving in parallel
Ball
screw
Figure 3.5.1 System Structure
The build-in gantry control function from Delta ASDA-A2 allows users to use the related
applications. The controller will simultaneously follow the motion automatically. When position
deviation goes beyond the permitted range, alarm will occur and system will stop working. In this
application, an open-loop control is used by the host controller and ASDA-A2 servo system; the
mission of the host controller is to send position commands, exercise sequential logic control,
and give orders to the servo system to conduct initialization. That is, a host controller is in charge
of the alignment and homing control of two axes. If regarding Z pulse as the homing origin, a host
controller requires the capability to respond to the shortest Z pulse signal of 66 μs from
ASDA-A2.
If misalignment of two axes does not occur on users’ mechanism, positioning function is not
needed. Otherwise, it requires positioning before gantry starts working because no chance will
be given to adjust the two axes’ relative position after it starts. The following is a reference of
positioning and homing provided by Delta.

 Loading...
Loading...




