ASDA Series Application Note Introduction of PR Operation
March, 2015 1-15
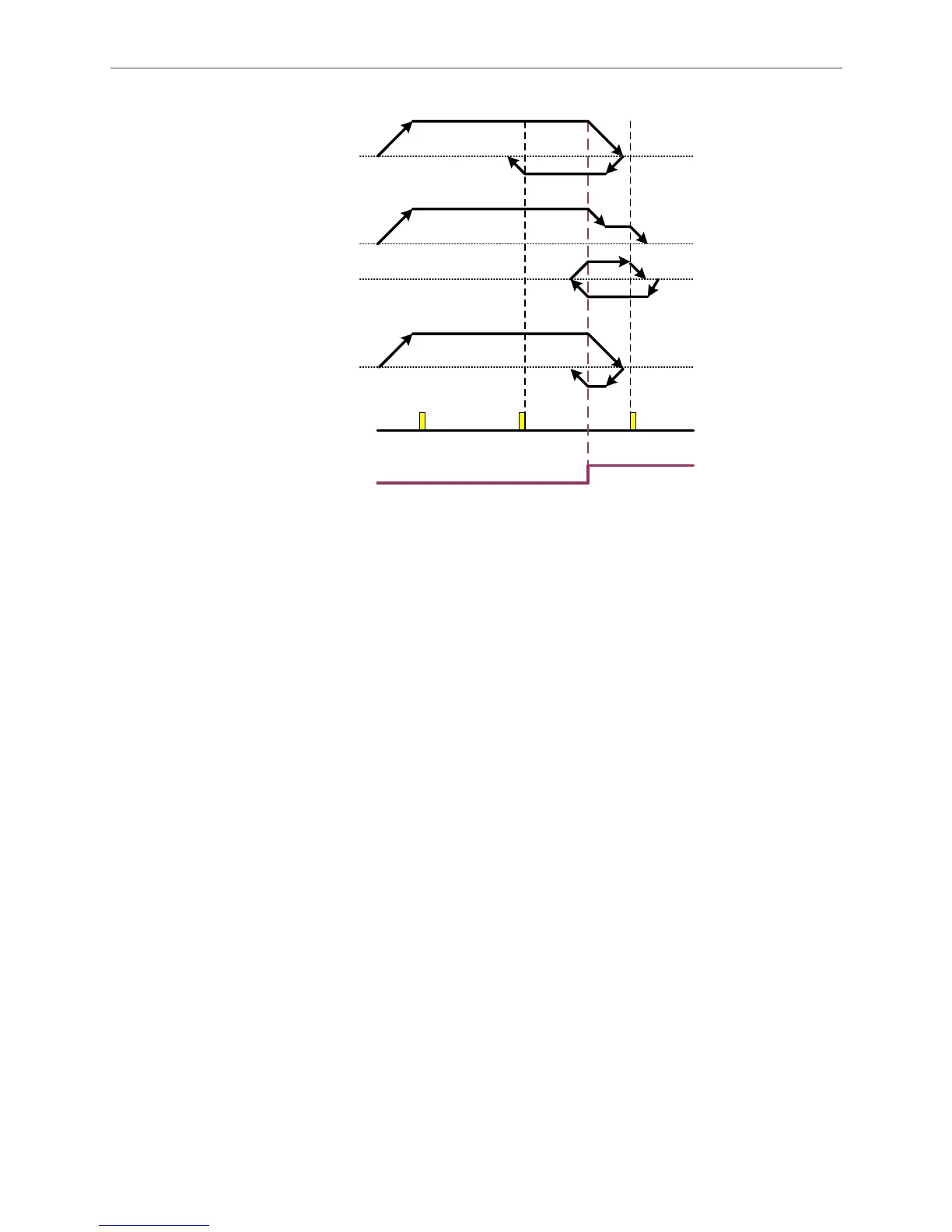
Figure 1.18 Homing Path when Reference to Limit Signal
In Figure 1.18, take Y=1 and look for Z for example, no matter the starting position is S1 or S2, it
will stop at position E after homing is completed. When starting position is S1, the motor will
operate at higher speed until reaching the rising signal of positive limit (PL) and then turn to lower
speed to look for Z pulse. When Z pulse is found, the motor will decelerate to stop. When starting
position is S2, as the PL is triggered, ASDA-A2 servo drive will have sensed that the current
position has gone beyond the PL signal; motor will return and look for the rising signal of PL at
low speed; upon finding, motor moves backward to look for Z pulse and then stop.
PL Signal
Z Pulse
H
L
Y=0, Return to Z
Y=1, Ahead to Z
Y=2, Do not search
for Z
E
S1
S1
S2
H
H
L
L
L
L
E
E
E
S1
low
high

 Loading...
Loading...




