ASDA Series Application Note Introduction of PR Operation
March, 2015 1-19
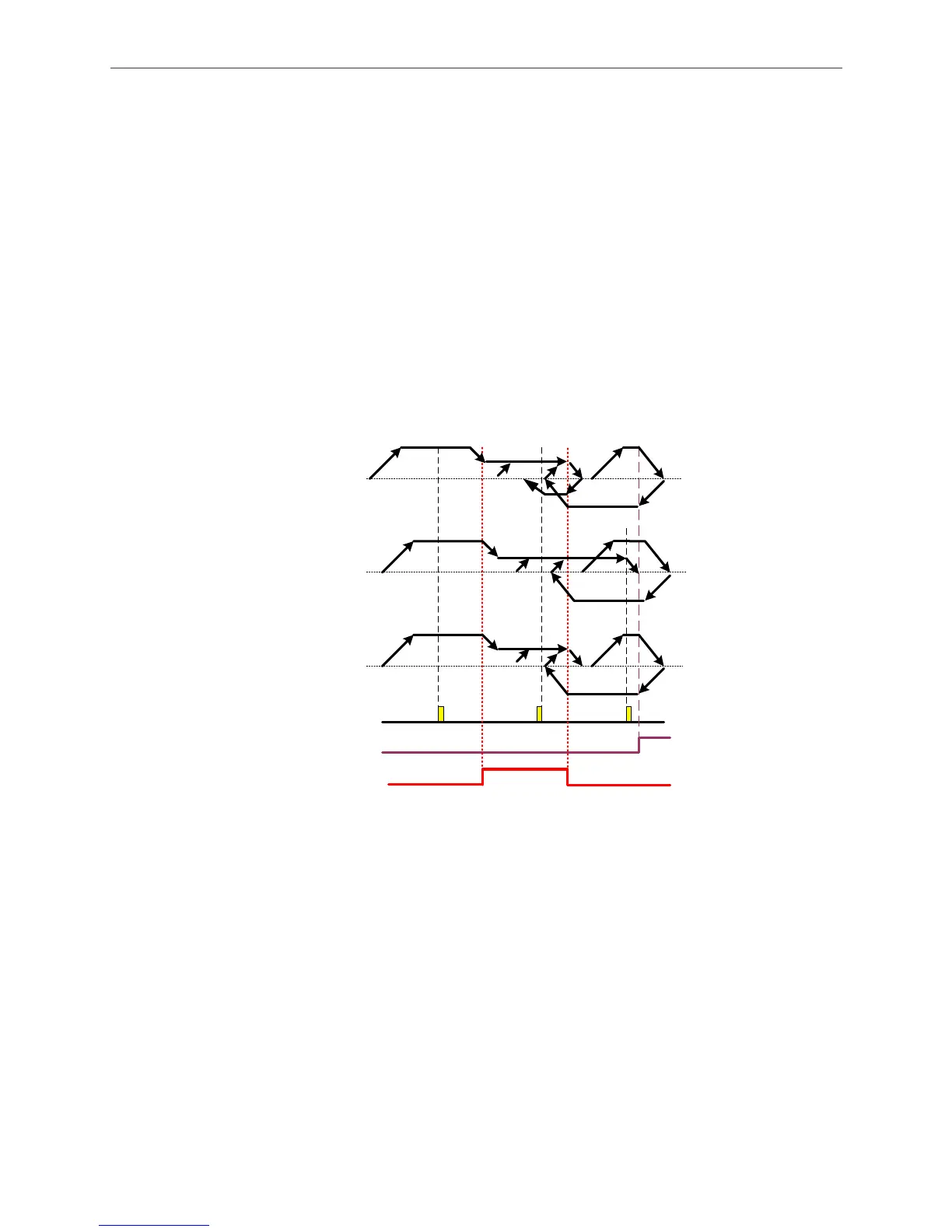
When starting from position S2, it means when issuing the homing command, the sensor board
has passed through the sensor. The sensor board will encounter limit signal first; meanwhile,
motor can be selected to automatically reverse or to stop and display errors. In this example,
motor encounters the limit signal and then reverse automatically. Before encountering the ON
signal of ORG sensor, motor would operate at high speed. After ORG signal is triggered, motor
will then switch to low speed and reverse to find the falling edge signal of ORG sensor. Next, it
will return and look for Z pulse and stop at position E upon finding Z signal.
S3: While homing command is issued, the sensor board happens to be at the position of the
ORG sensor. As it is a falling edge trigger, motor would operate at low speed to look for the
falling edge signal of ORG. Upon finding the falling signal, motor will return to look for Z pulse
and then it slows down to stop at position E after finding Z pulse.
Whether starting position is at S1, S2, or S3, the position of origin is at E.
Figure 1.24 Homing Path when Taking Falling-edge Signal of Home Sensor as Reference
PL Signal
Z Pulse
Y=0, Return to Z
Y=1, Ahead to Z
Y=2,
Do not look for Z
ORG Signal
H
S1
E
S1
H
L
E
H
H
S2
S1
ERR
ERR
ERR
L
L
H
S2
H
H
L
H
H
E S2
S3
S3
S3

 Loading...
Loading...




