ASDA Series Application Note Introduction of PR Operation
March, 2015 1-53
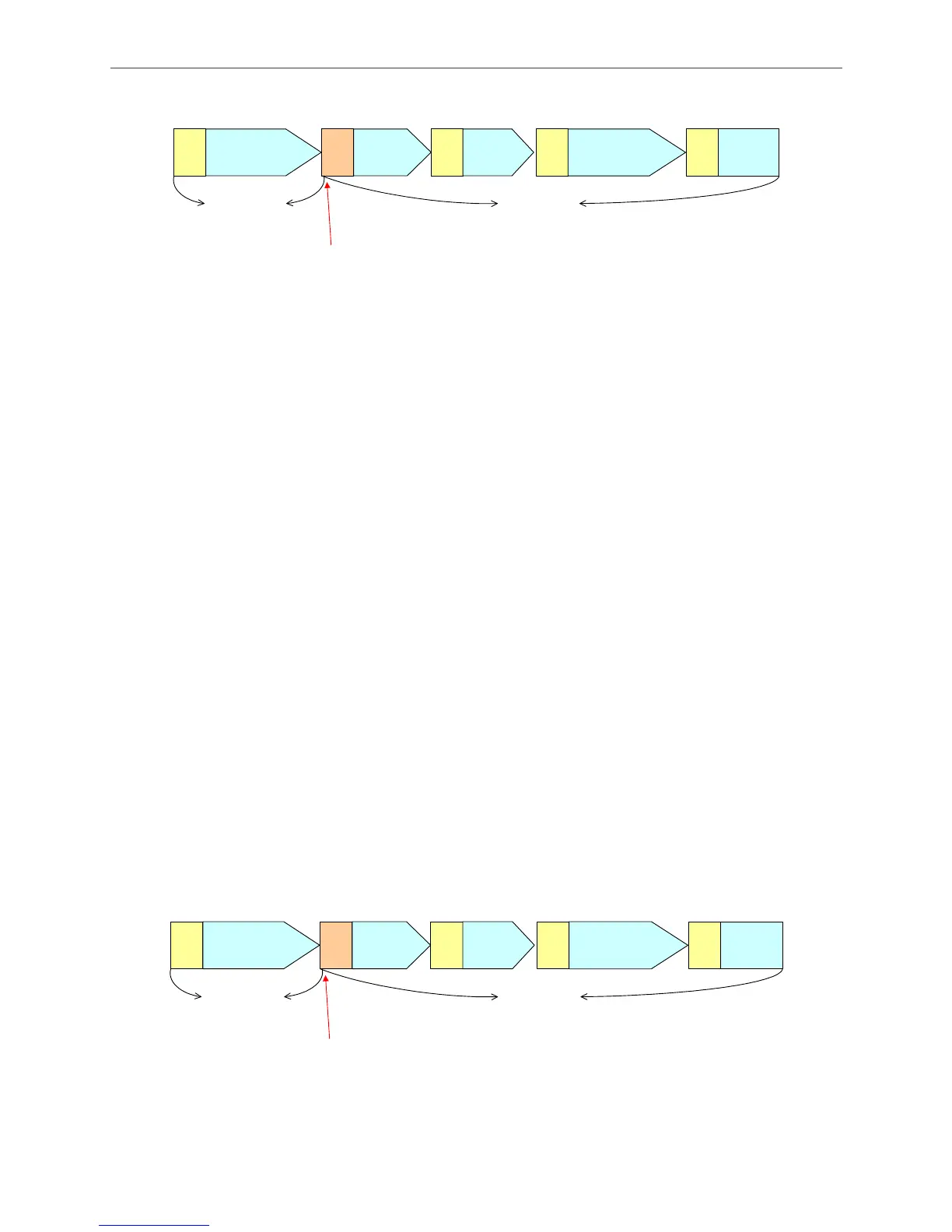
Example 3:
PR
#1
Position (3)
D=0 S= 20.0 rpm
20 000 0 PUU, INC
PR
#2
Jump
DLY= 0
PR#10
PR
#10
(I)
Write
DLY=0
P5-55=10
PR
#11
(I)
Pos it i on (3)
D=0, S =10 0.0 r pm
30 000 0 PUU , I NC
PR
#12
(I)
Write
DLY=0
P5-55=12
(A ) 1ms
Command group
(B ) 1ms
,
Command group
When command group (A) is completed, command group (B) will be executed.
Figure 1.70 Example 3
PR Motion Analysis:
In Figure 1.70, as PR#1 and PR#2 have no interrupt; PR#1 will enter PR executor first. After 1ms,
PR#1 takes other PR commands into the executor.
After PR#1 is completed in the executor, as it is a motion command, it will be distributed to
motion command generator to generate motion command.
Other PR commands that enter the executor have to wait to be executed until PR#10 is
completed. When PR#10 is completed and P5-55 = 10, PR#12 will interrupt immediately. Same
as Example 2, result of P5-55 = 10 only lasts shortly and will be replaced by the result of P5-55 =
12. Since PR#2 has no interrupt, motion command generated by PR#11 will not interrupt motion
command from PR#1. In this case, the servo system will continue to carry out the motion
command of PR#11after that of PR#1.
Result:
Figure 1.71 is the result after carrying out PR groups in Example 3.
Regarding motor’s operation, the result is the same in Example 1. Motion commands from PR#1
and PR#11 will both be executed. And the second position command is carried out after the first
position command is over (after 4 sec.).
In terms of P5-55, as it cannot be carried out until position command of PR#1 is fulfilled, when t =
T ~ 4+T, P5-55 has not been set up. In this period, P5-55 will display the previous reserved value,
which is not referential. When t = 4, PR#2 ~ PR#12 start to be carried out and meanwhile the
value of P5-55 will be 10 first for a very short time, then change to 12, which is identical to
Example 2.
PR
#1
Position (3)
D=0 S= 20.0 rpm
20 000 0 PUU, I NC
PR
#2
Jump
DLY=0
PR#10
PR
#10
(I)
Write
DLY=0
P5-55=10
PR
#11
(I)
Pos iti on (3 )
D=0, S =10 0.0 r pm
30 000 0 PUU , I NC
PR
#12
(I)
Write
DLY=0
P5-55=12
(A ) 1ms (B ) 1ms
Command Group
,
Command Group
When command group (A) is completed, command group (B) will be executed.
 Loading...
Loading...





