Chapter 16 PLC Function ApplicationsC2000 Plus
16-139
If slave devices have a slow start-up, the master can delay for a short time before performing
slave station configuration; this time delay can be set via D1092.
Special D Description of Function Default R/W
D1092 Delay before start of initialization 0 RW
With regard to slave device initialization, a delay time can be set to judge whether failure has
occurred. If the communications speed is relatively slow, the delay time can be adjusted to judge
whether initialization has been completed, which will ensure that there is time to perform slave
device initialization.
Special D Description of Function Default R/W
D1099
Initialization completion delay time
Setting range: 1 to 60000 sec.
15 sec. RW
After communication is successful, the system must detect whether there is a break in
communications with the slave station. D1093 is used to set detection time, and D1094 sets the
number of consecutive errors that will trigger a break error.
Special D Description of Function Default R/W
D1093 Break time detection 1000ms RW
D1094 Break number detection 3 RW
The packet type transmitted by PDO is set before establishing normal communications and
generally does not require adjustment.
Special D Description of Function Default R/W
D1097
Corresponding real-time transmission type
(PDO)
Setting range: 1–240
1 RW
D1098
Corresponding real-time receiving type (PDO)
Setting range: 1–240
1 RW
The third block is the slave station mapping and control area.
CANopen provides a PDO method to perform mapping of the master and slave station memory,
and enables the master to directly access read/write data in a certain memory area. The master
will automatically perform data exchange with the corresponding slave device, and the read/write
values can be seen directly from the special D area after real-time exchange (M1034 = 1 time)
has been established. The C2000 Plus currently supports real-time mapping of four PDOs, and
there are two types of PDO RXPDO (reads slave device information) and TXPDO (writes to slave
device). In addition, in order to facilitate control, the C2000 Plus cannot perform mapping of
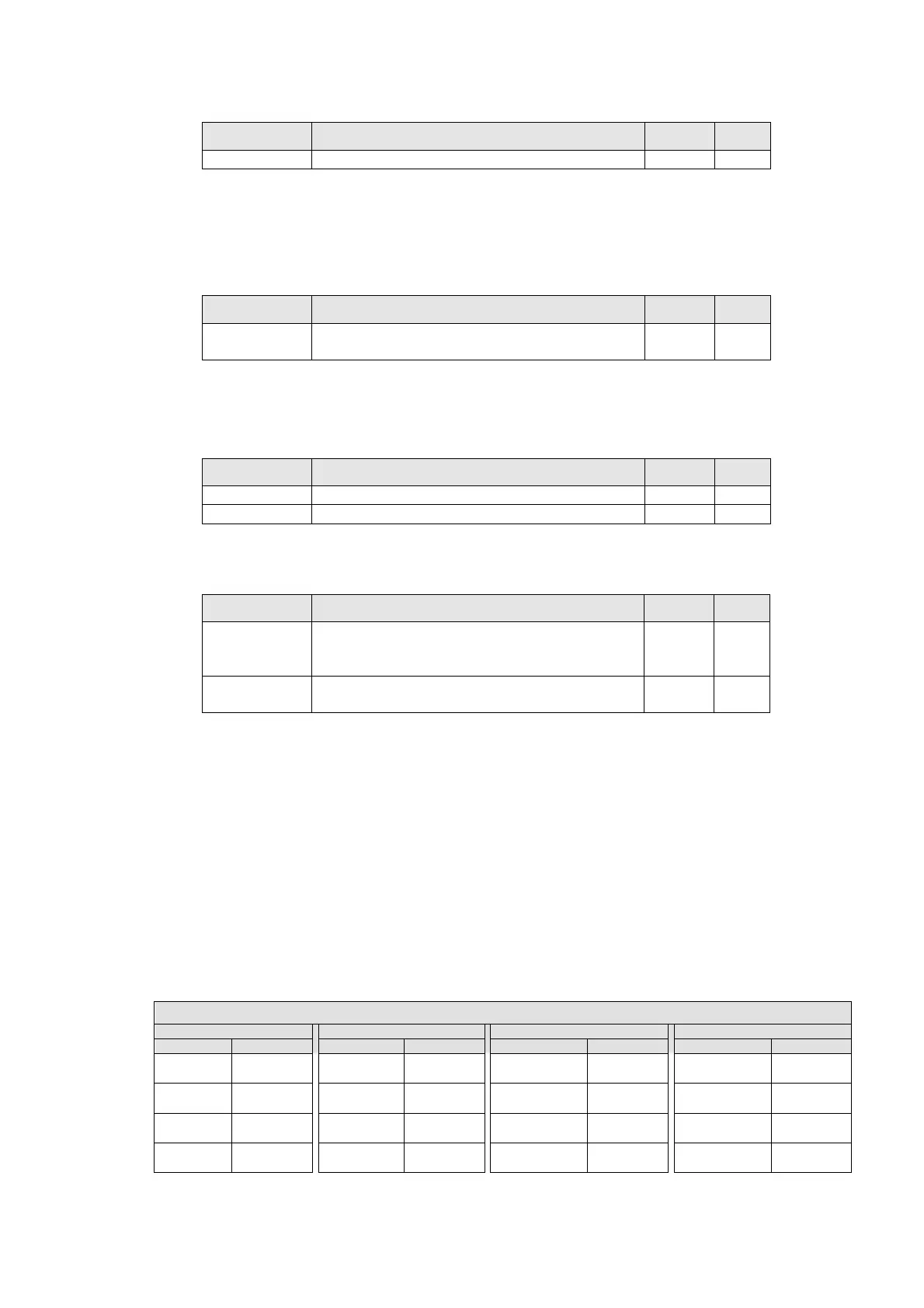
commonly-used registers; the following is an overview of the current PDO mapping situation:
TXPDO
PDO4 (Torque) PDO3 (Position) PDO2 (Remote I/O) PDO1 (Speed)
Description Special D Description Special D Description Special D Description Special D
Controller
word
D2008+100*n
Controller
word
D2008+100*n Slave device DO D2027+100*n Controller word D2008+100*n
Target
torque
D2017+100*n
Target
position
D2020+100*n
D2021+100*n
Slave device
AO1
D2031+100*n
Target speed D2012+100*n
Control
method
D2010+100*n
Control
method
D2010+100*n
Slave device
AO2
D2032+100*n
Slave device
AO3
D2033+100*n