Chapter 12 Description of Parameter SettingsC2000 Plus
12.2-22
8. Adjust the setting of FOC speed observer and per-unit value of inertia (common problems)
Pr.10-25: Set up FOC bandwidth of speed observer
Situation 1. Speed command changes rapidly, but speed response cannot follow.
(Speed response is too slow→Increase the setting value)
Situation 2. The noise of the observer is too large, and causes the operation diverged.
(Speed noise is too large→Decrease)
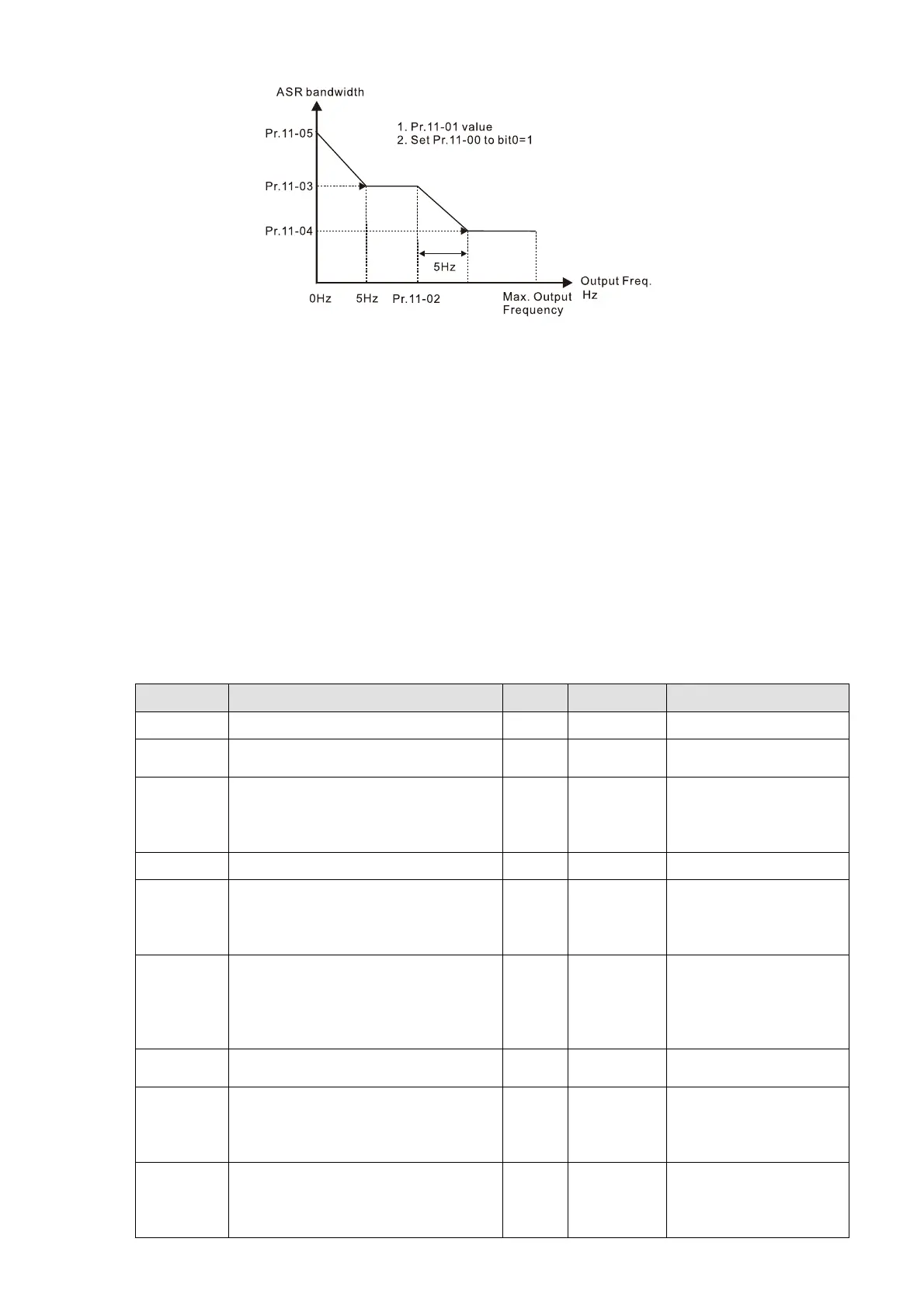
Pr.11-01: Set up per unit of system inertia
Situation 1. The inrush current is too high at start-up, and causes an oc error.
Situation 2. An ocn error occurs during RUN or STOP, and the motor runs randomly.
a. Check Pr.11-01 whether the JM per-unit of system inertia is too large.
b. Decrease Pr.10-25 FOC bandwidth for speed observer or Pr.11-05 zero-speed bandwidth.
IMFOC Sensorless adjustment parameters
Refer to Section 12-1 Description of Parameter Settings for more details
Parameter Description Unit Default Settings
00-11 Speed control mode 0 0–8
01-01 Motor 1 Rated / Base Frequency Hz
60.00 /
50.00
0.00–599.00
01-02
Motor 1 Rated / Base Output
Voltage (V
AC
)
V
Depending
on the
model
power
Depending on the
model power
05-00 Motor parameter auto-tuning 0 0–13
05-02
Rated power for induction motor
1 (kW)
kW
Depending
on the
model
power
0.00–655.35
05-03
Rated speed for induction motor 1
(rpm)
rpm
Depending
on the
motor’s
number of
poles
0–xxxx
(Depending on the
motor’s number of
poles)
05-04
Number of poles for induction motor
1 (poles)
4 2–64
05-05
No-load current for induction
motor 1 (A)
Depending
on the
model
power
0.00–Pr.05-01 default
05-06
Stator resistance (Rs) for induction
motor 1 (Ω)
Ω
Depending
on the
model
power
0.000–65.535