6 Motion Instructions & G-Code Instructions
DVP-PM Application Manual
6-2
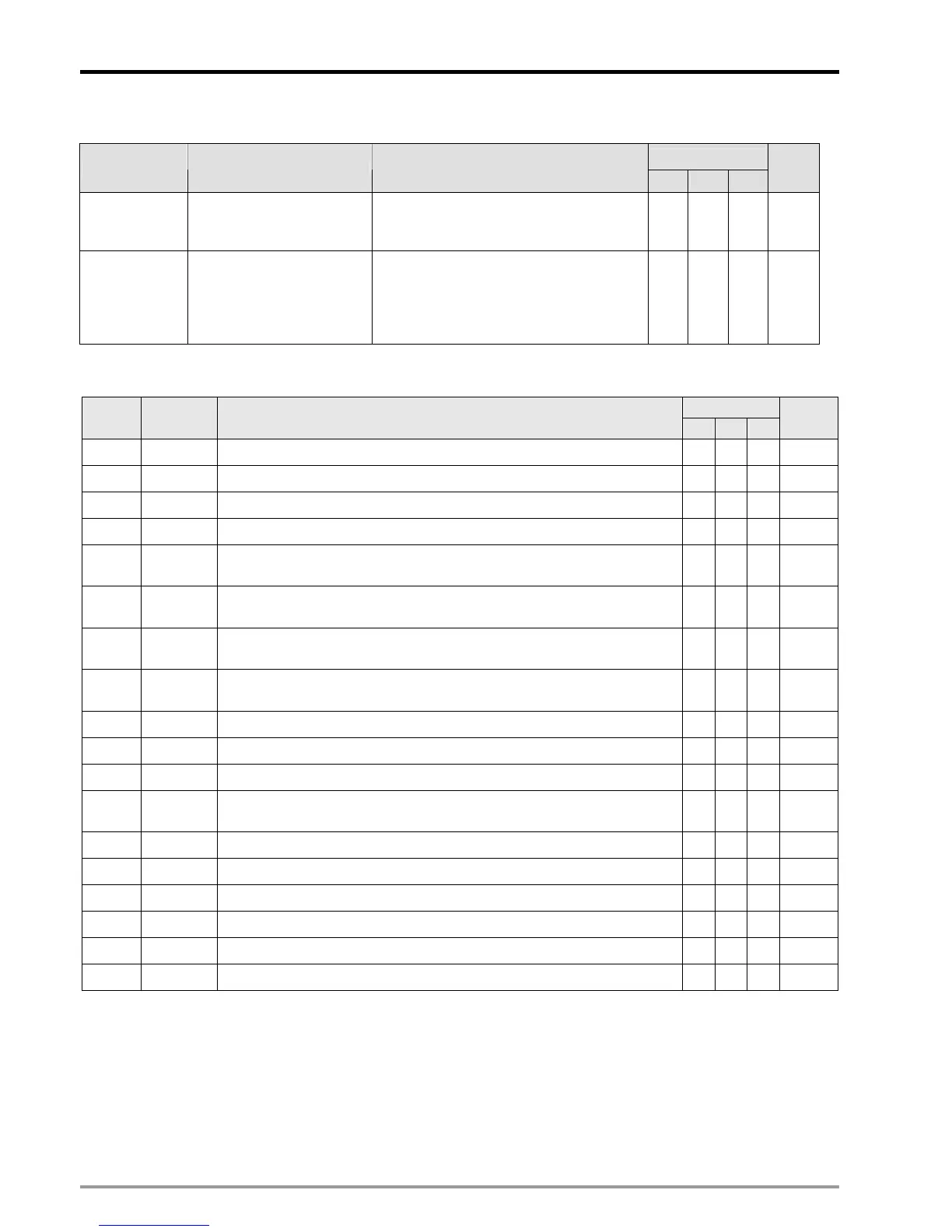
O Pointer / M Pointer (M code)
Model
Pointer Function Explanation
20D 20D 10M
Page
O
Main program / Motion
Subroutine pointer
Main Program:O100,
Motion subroutine: OX0 ~ OX99
9 9
6-40
M
M pointer / M code
M0 ~ M65535
M102: End of O100 main program
M2: end of OX0 ~ OX99 motion subroutine
9 9
6-41
G-Code Instructions
Model
G-Code Mnemonic Function
20D 20M 10M
Page
00 DRV 2-Axis High-Speed Positioning
9 9
6-47
00 DRV 3-Axis High-Speed Positioning
9
6-44
01 LIN 2-Axis Synchronous Linear Interpolation (considering remaining distance)
9 9
6-50
01 LIN 3-Axis Synchronous Linear Interpolation (considering remaining distance)
9
6-48
02 CW
Clockwise Arc Movement (set distance to center of arc, considering remaining
distance)
9 9
6-51
02 CW
Clockwise Helical Movement (set distance to center of arc, considering
remaining distance)
9
6-51
03 CCW
Counterclockwise Arc Movement (set distance to center of arc, considering
remaining distance)
9 9
6-51
03 CCW
Counterclockwise Helical Movement (set distance to center of arc, considering
remaining distance)
9
6-51
02 CW Clockwise Arc Movement (set radius, considering remaining distance)
9 9
6-52
02 CW Clockwise Helical Movement (set radius, considering remaining distance)
9
6-52
03 CCW Counterclockwise Arc Movement (set radius, considering remaining distance)
9 9
6-52
03 CCW
Counterclockwise Helical Movement (set radius, considering remaining
distance)
9
6-52
04 TIM Pause Time
9 9
6-53
17 NULL Set up X-Y plane
9
6-54
18 NULL Set up X-Z plane
9
6-54
19 NULL Set up Y-Z plane
9
6-54
90 ABST Set up Absolute Coordinate
9 9
6-54
91 INCT Set up Relative Coordinate
9 9
6-54

 Loading...
Loading...










