15 Appendix
DVP-PM Application Manual
14-1
15.1 Appendix A: Error Codes
If error occurs in O100 or OX program area in DVP-PM, the error flag will be ON and ERROR indicator will flash. The
causes of errors could be illegal use of instruction operand (device), program syntax error, or improper setting of
motion subroutine patameters. Users can monitor the error register and obtain the cause of error according to the
error code in error registertrs.
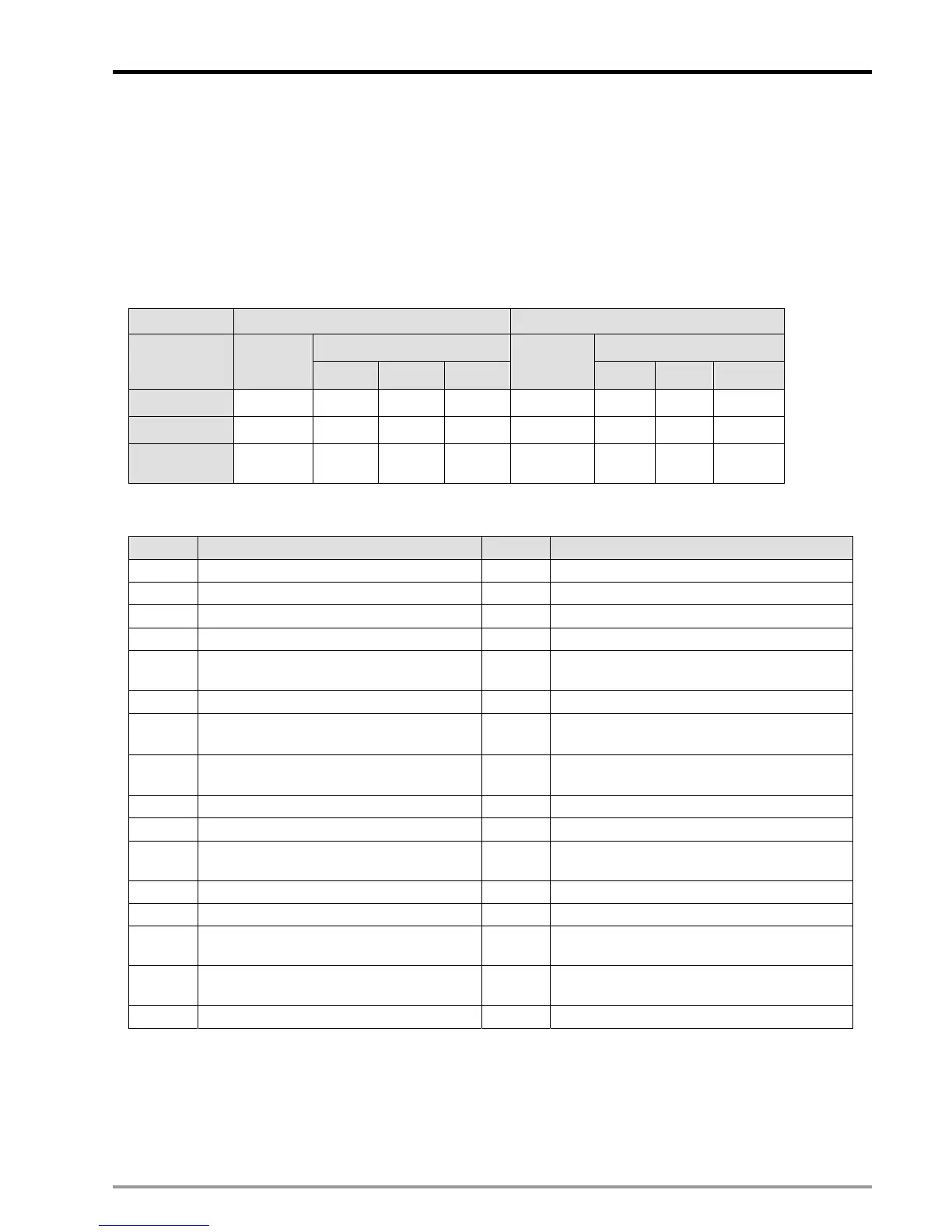
Error codes in all program areas and motion axes & devices for displaying steps
Program area O100 OX
Motion error Motion error
Error type
Program
error
X axis Y axis
Z axis
Program
error
X axis Y axis
Z axis
Error flag
M1953 M1793 M1873 M2033 M1793 M1793 M1873 M2033
Error register
D1802 D1857 D1937 D2017 D1857 D1857 D1937 D2017
Number of
error step
D1803 D1869 D1869 D1869
Error codes for program area and motion axis (in hex)
Code Cause Code Cause
0002 No content in the applied subroutine 0031 Forward pulses prohibited
0003 No corresponding Pn for CJ, CJN, JMP 0032 Reverse pulses prohibited
0004 There is a subroutine flag in main program 0033 Left/right limit achieved
0005 No subroutine 0040 Incorrect use range of device
0006 Repeated index in the same program 0041
MODRD and MODWR communication
time-out
0007 Repeated subroutine index 0044 V/Z modification error
0008
Repeated index of jump instructions in
different subroutines
0045 Floating point conversion error
0009
JMP instruction and CALL instruction are
using the same flag.
0E18 BCD conversion error
000A The index is the same as subroutine index 0E19 Arithmetic error in division (divisor = 0)
0011 Incorrect target position (I) setting C401 General loop error
0012
Incorrect target position (II) setting C402 Continuous use of LD/LDI for more than 9
times
0021 Incorrect running speed (I) setting C404 RPT ~ RPE are used more than 1 layer
0022 Incorrect running speed (II) setting C405 SRET is used between RPT ~ RPE
0023
Incorrect zero return speed (V
RT
) setting C4EE There is no end instruction (M102, M2) in the
program
0024
Incorrect zerp return deceleration speed
(V
CR
) setting
C4FF
No such instruction / Incorrect operand
format or incorrect range
0025 Incorrect JOG speed setting

 Loading...
Loading...










