6 Motion Instructions and G-Code Instructions
DVP-PM Application Manual
6-9
MON Mnemonic Operands Function
01
LIN
X P
1
Y P
2
Z P
3
F V
Linear Interpolation
(considering remaining
distance)
Controllers
20PM -
Bit Devices Double-Word Devices Notes
Type
K H D KK HH DD
P
1
* * * * * *
P
2
* * * * * *
P
3
* * * * * *
F * * * * * *
LIN instruction supports V, Z index register
modification on the devices.
See specifications of DVP-PM for the applicable
range of each device.
You can place an M-Code instruction after LIN.
Operands:
P
1
: Target position on X axis P
2
: Target position on Y axis P
3
: Target position on Z axis
V: Speed for linear interpolation
Explanations:
1. Maximum V =
V
MAX
.
2. Range of parameters: (16-bit) K = -32,768 ~ 32,767; H = 0 ~ FFFF; D = 0 ~ 9,999; (32-bit) KK = -2,147,483,648
~ 2,147,483,647; HH = 0 ~ FFFFFFFF; DD = 0 ~ 9,998.
3. Acceleration/deceleration time and bias speed can be set up in special D.
4. Acceleration/deceleration time increases or decreases in proportional to the setting of V
MAX
.
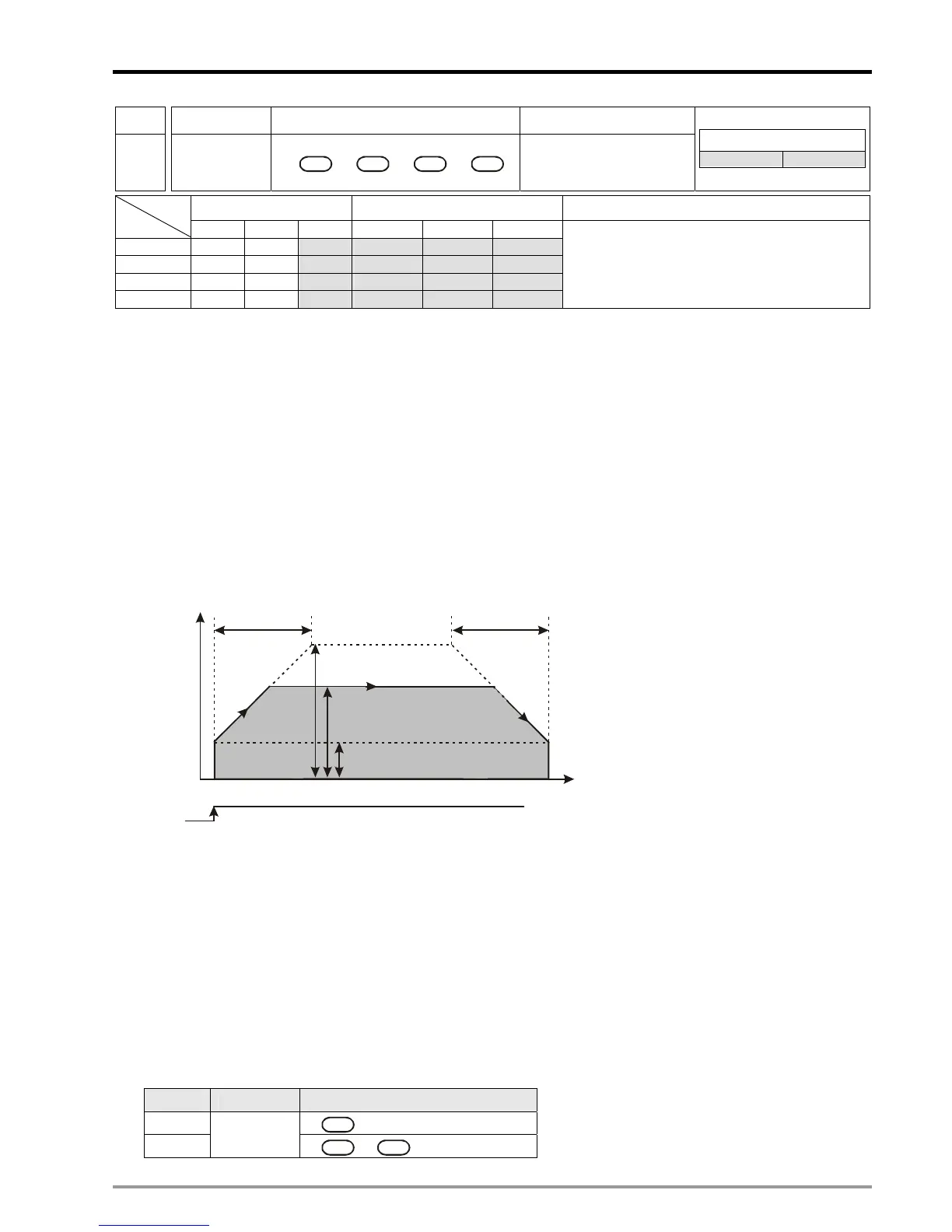
5. Timing diagram:
Speed
T
ACC
DEC
V
MAX
Time
V
BIAS
Start
Interpolation speed
Target position
6. The interpolation speed can be monitored by special registers: D1850 ~ D1851 for X axis; D1930 ~ D1931 for Y
axis; D2010 ~ D2011 for Z axis.
7. D1865 is for setting up stop mode with the consideration on the remaining distance (see Remarks for more
information).
8. 16-bit devices and 32-bit devices can be used together.
9. Target position is required, but moving speed could be left out.
10. If you set up the target position on the axis without setting up the moving speed, the operation will run at V
MAX
11. 20D model only supports 2-axis (X/Y) synchronous interpolation positioning, and therefore there are 6 operand
combinations for LIN instruction.
NO. Instruction Operand combination
1

 Loading...
Loading...










