6 Motion Instructions & G-Code Instructions
DVP-PM Application Manual
6-14
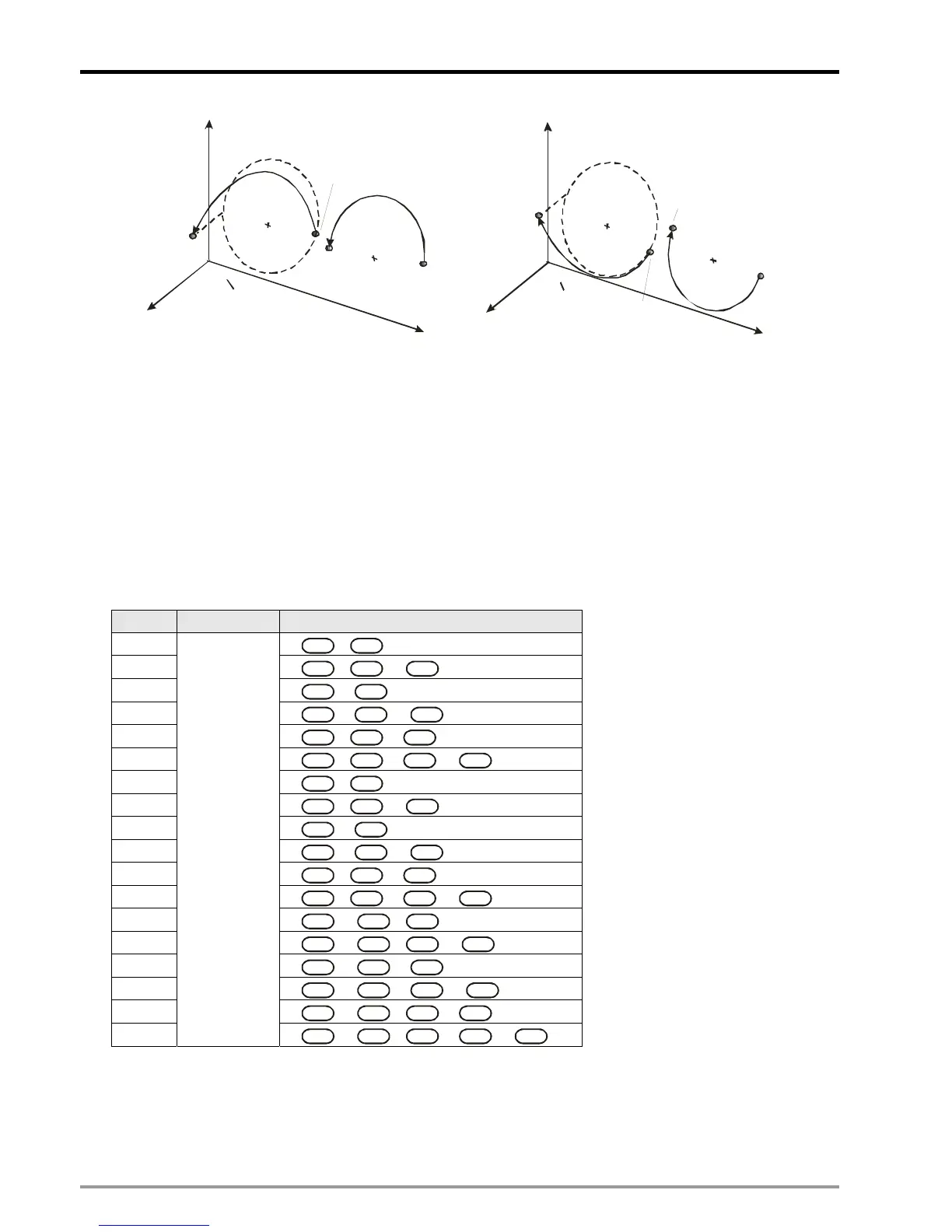
X
Y
Z
X= 0
X= 0
CCW (counterclockwise)
X
Y
Z
X=0
X=0
CW (clockwise)
Target point
(x, y, z)
Starting
point
Center
(J, K)
Center
(J, K)
Tar get poi nt
(y, z)
Starting
point
Target point
(x, y, z)
Center
(J, K)
Center
(J, K)
Target point
(y, z)
Starting
point
Starting
point
12. 16-bit devices and 32-bit devices can be used together.
13. Programming rule: (1) Target position and distance to center is a must while the moving speed is not; (2) If the
coordinate of X/Y/Z axis of target position is the same with that of current position, the same X/Y/Z value could
be left out; (3) If the distance to center of arc/helix has no variation, it could also be left out.
14. If you set up the target position on the axis without setting up the moving speed, the operation will run at V
MAX
15. The arc/helical movement can reach 360°
16. 20D model only supports 2-axis (X-Y plane) arc interpolation, and according to the programming rule, there are
18 operand combinations for CW/CCW instruction.
NO. Instruction Operand combination
1
X P
1
I P
3
2
X P
1
I P
3
F V
3
X P
1
J P
4
4
X P
1
J P
4
F V
5
X P
1
I P
3
J P
4
6
X P
1
I P
3
J P
4
F V
7
Y P
2
I P
3
8
Y P
2
I P
3
F V
9
P
2
I P
3
J P
4
F V
17. 20M model supports 3-zxis arc/helical interpolation, and according to the programming rule, there are 78
operand combinations for CW/CCW instruction.

 Loading...
Loading...










