6 Motion Instructions & G-Code Instructions
DVP-PM Application Manual
6-22
MON Mnemonic Operands Function
06
TIM
T
Pause Time
Controllers
20PM 10PM
Bit Devices Double-Word Devices Notes
Type
K H D KK HH DD
T
* * * * * *
TIM instruction supports V, Z index register
modification on the devices.
See the specifications of DVP-PM for the
applicable range of each device.
You can place an M-Code instruction after TIM.
Operands:
T: Pause time (unit: 10ms => K100 refers to pausing for 1 second)
Explanations:
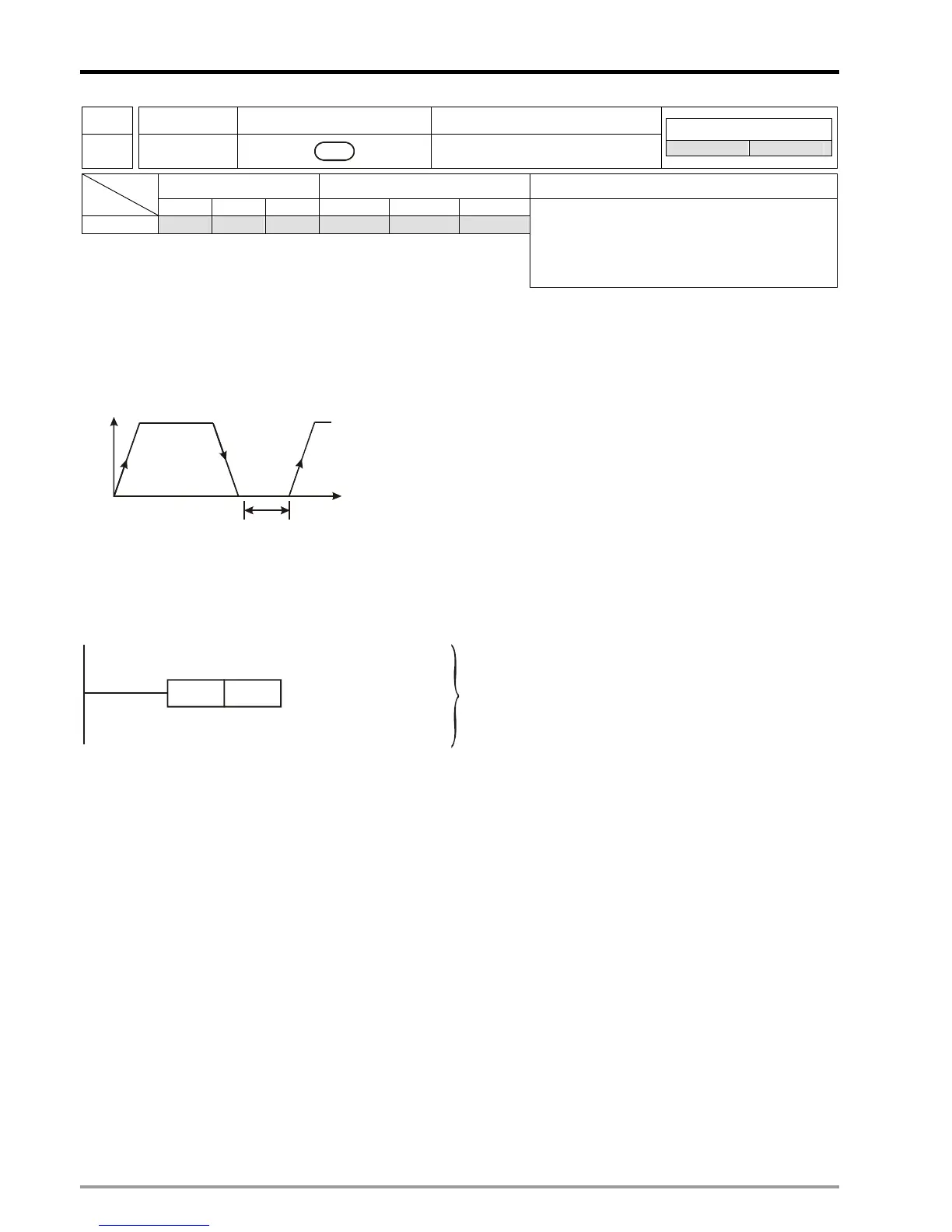
1. TIM instruction is used for setting up the pause time between one instruction and another instruction.
TIM
Time
2. Range of parameters: (16-bit) K = 0 ~ 32,767; H = 0 ~ FFFF; D = 0 ~ 9,999; (32-bit) KK = -2,147,483,648 ~
2,147,483,647; HH = 0 ~ FFFFFFFF; DD = 0 ~ 9,998.
Program Example:
TIM K100
.
.
.
.
.
.
Pause for 1 second
Ox0 subroutine
 Loading...
Loading...











