P
2
,
F V
1
F V
2
1-axis Double-speed
Positioning with Additional
Distance
Controllers
20PM -
Bit Devices Double-Word Devices Notes
Type
K H D KK HH DD
P
1
* * * * * *
P
2
* * * * * *
V
1
* * * * * *
V
2
* * * * * *
DINTR instruction supports V, Z index register
modification on the devices.
See specifications of DVP-PM for the applicable
range of each device.
You can place an M-Code instruction after DINTR.
Operands:
P
1
: Additional distance on X axis P
2
: Additional distance on Y axis V
1
: The first speed
V
2
: The second speed
Explanations:
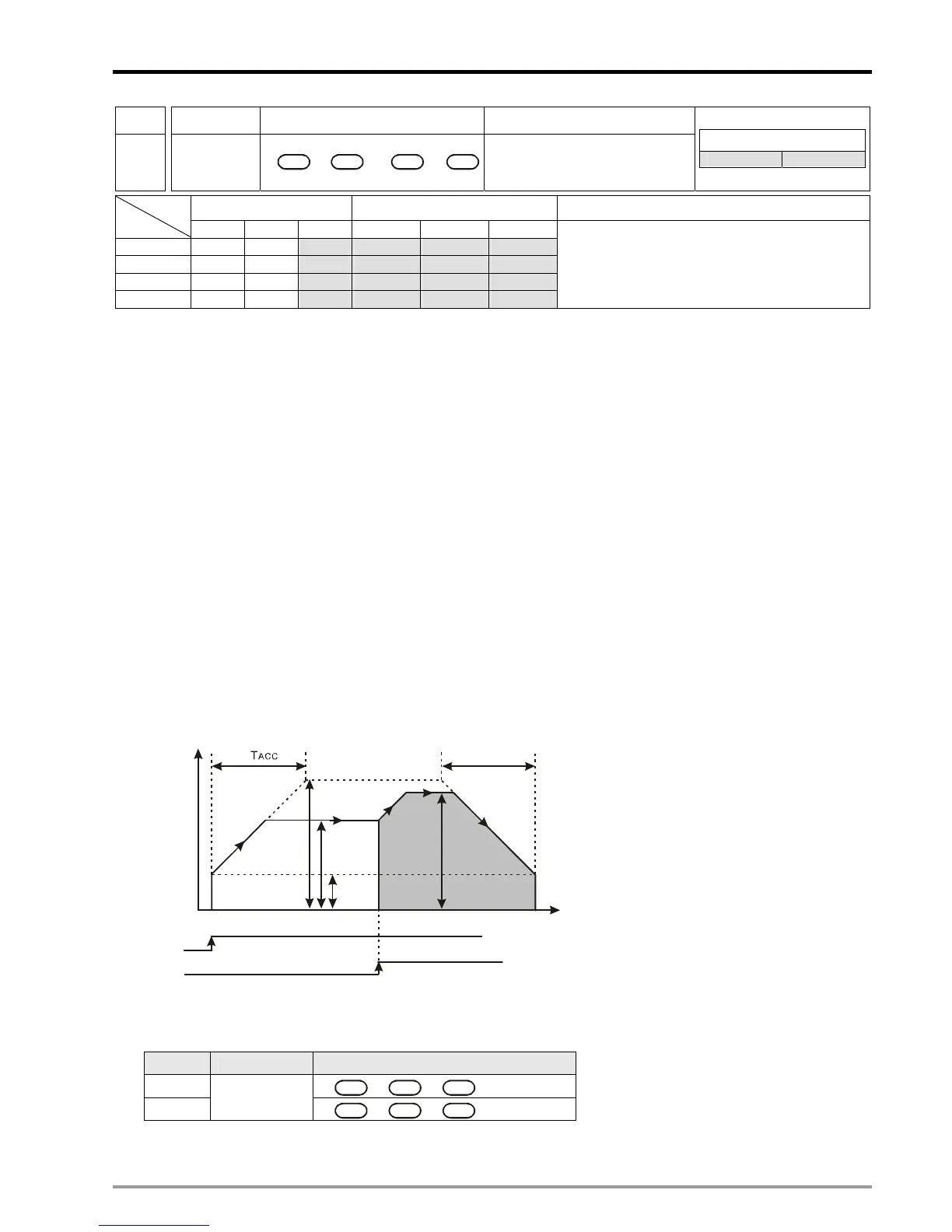
1. When DINTR instruction is enabled, the operation speed will start from
V
BIAS
and accelerate to V(I) and then
operate stably. When the execution encounters DOG signal, it will further accelerate to V(II) then finish the
additional distance set by the instruction.
2. Maximum V
1
, V
2
= V
MAX
.
3. The first operand of DINTR can be either X axis or Y axis for double speed positioning with additional distance.
4. Range of parameters: (16-bit) K = -32,768 ~ 32,767; H = 0 ~ FFFF; D = 0 ~ 9,999; (32-bit) KK = -2,147,483,648
~ 2,147,483,647; HH = 0 ~ FFFFFFFF; DD = 0 ~ 9,998.
5. Acceleration/deceleration time and bias speed can be set up in special D.
6. Acceleration/deceleration time increases or decreases in proportional to the setting of V
MAX
.
7. The 16-bit devices and 32-bit devices can be used together.
8. Timing diagram:
Speed
T
DEC
V
XMA
Time
V
BIAS
Start
DO

 Loading...
Loading...










