Chapter 12 Description of Parameter Settings
ME300
08 High-function PID Parameters
You can set this parameter during operation.
Terminal Selection of PID Feedback
D
efault: 0
S
ettings 0: No function
1:
Negative PID feedback: by analog input (Pr.03-00)
4:
Positive PID feedback: by analog input (Pr.03-00)
7:
Negative PID feedback: by communication protocol
8:
Positive PID feedback: by communication protocol
Negative feedback means:
+ target value - feedback. The detection value increases by increasing the output frequency.
Positive feedback means:
- target value + feedback. The detection value decreases by increasing the output frequency.
When Pr.08-00 ≠ 7 neither ≠ 8, the input value is disabled. The value of the setting does not
remain the same after the drive is off.
1. Common applications for PID control:
Flow control: Use a flow sensor to feedback the flow data and perform accurate flow control.
Pressure control: Use a pressure sensor to feedback the pressure data and perform precise
pressure control.
Air volume control: Use an air volume sensor to feedback the air volume data to achieve
excellent air volume regulation.
Temperature control: Use a thermocouple or thermistor to feedback temperature data for
comfortable temperature control.
Speed control: Use a speed sensor or encoder to feedback motor shaft speed or input
another machine speed as a target value for closed loop speed control of the master-slave
operation.
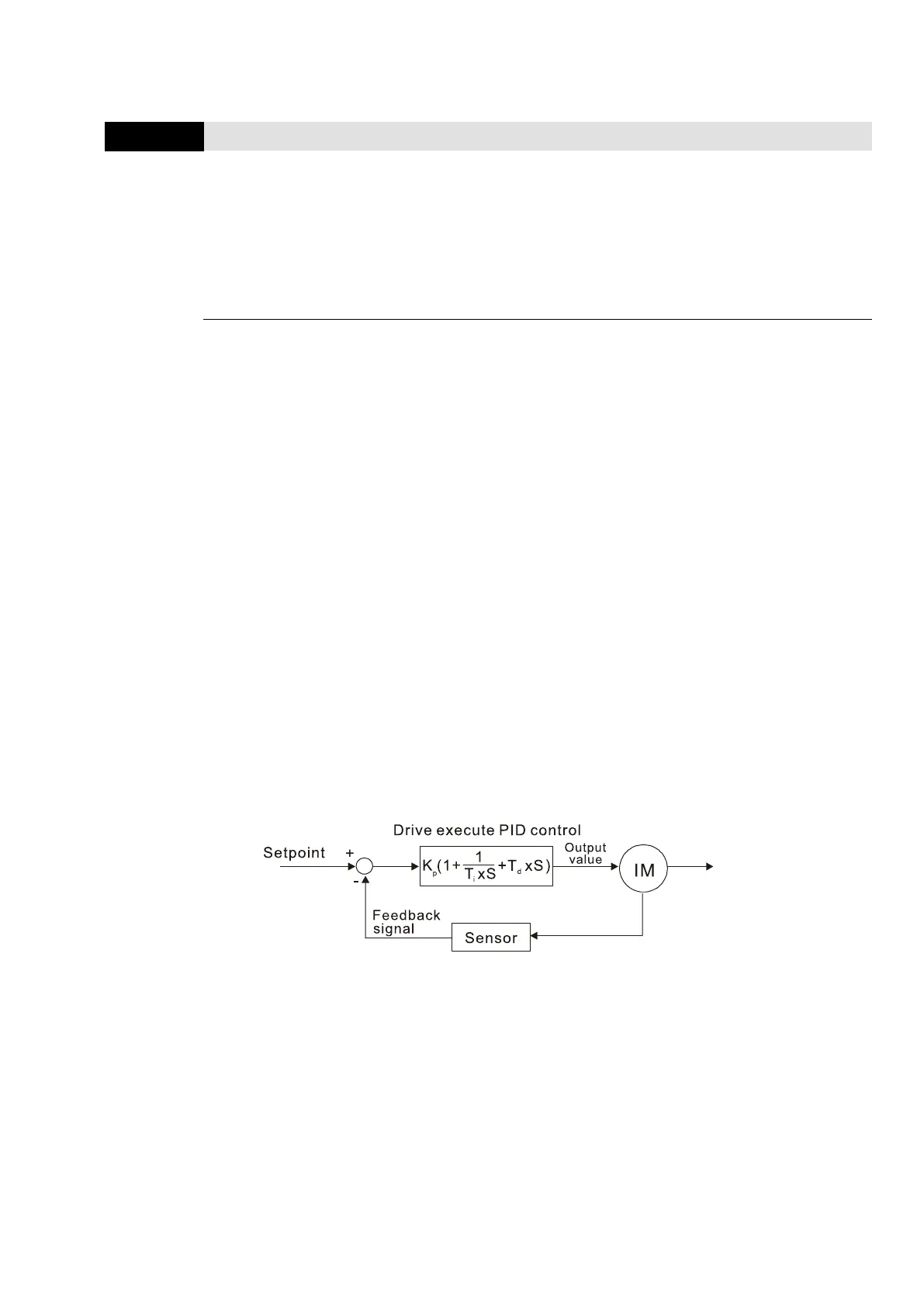
2. PID control loop:
3. Concept of PID control:
Proportional gain (P):
The output is proportional to input. With only proportional gain control, there is always a steady-
state error.
Integral time (I):
The controller output is proportional to the integral of the controller input. To eliminate the steady-
state error, add an “integral part” to the controller. The integral time controls the relation between
the integral part and the error. The integral part increases over time even if the error is small. It
gradually increases the controller output to eliminate the error until it is zero. This stabilizes the
system without a steady-state error by using proportional gain control and integral time control.

 Loading...
Loading...




