Chapter 15 Safe Torque Off Function
ME300
15-2 Safe Torque Off Terminal Function Description
The STO (Safe Torque Off) related terminal functions.
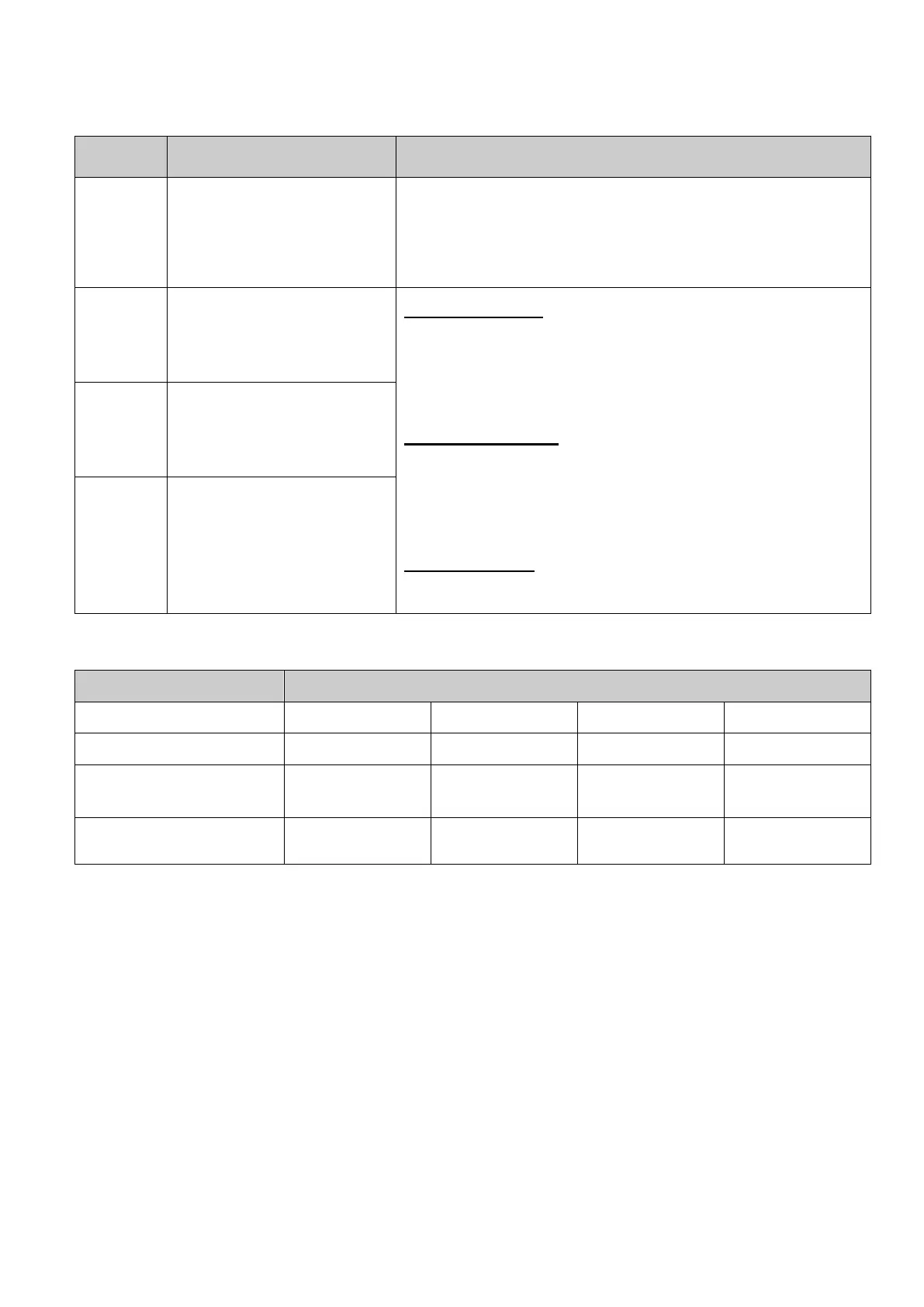
Terminals Terminal Function Description
+24 V
When the STO function is not
used, you can disable the STO
function by shorting S1 and S2
with +24 V.
Output voltage range: +24 V ±10%
Output voltage capacity: 100 mA
S1
Signal input for STO function
channel 1
S1–DCM / S2–DCM
Rated input voltage: +24 V
DC
±10%;
maximum input voltage: +30 V
DC
Rated input current: 6.67 mA ±10%
STO activation mode
Input voltage level: 0 V
DC
< S1–DCM and S2–DCM < 5 V
DC
STO response time: ≤ 20 ms
(time required for S1 / S2 to operate until the drive stops outputting)
STO cut-off mode
Input voltage level: 11 V
DC
< S1–DCM and S2–DCM < 30 V
DC
S2
Signal input for STO function
channel 2
DCM
Reference ground for S1 and
S2 signal
Table 15-1
The action logic and keypad display after the S1 / S2 signal input.
Signal Status
S1–DCM ON ON OFF OFF
S2–DCM ON OFF ON OFF
Drive output Ready to output
STL2 mode
(torque output off)
STL1 mode
(torque output off)
STO mode
(torque output off)
Error displayed on keypad
No error displayed STL2 STL1 STO
Table 15-2
S
TO means channel 1 and 2 operate simultaneously and enter Safe Torque Off.
STL1 means channel 1 operates.
STL2 means channel 2 operates.
STL3 means there is an error detected in the internal loop of channel 1 or channel 2.
S1
–DCM / S2–DCM ON: means S1–DCM / S2–DCM inputs a power supply > 11 V
DC
.
S1–DCM / S2
–DCM OFF: means S1–DCM / S2–DCM inputs a power supply < 5 V
DC
.

 Loading...
Loading...




