4. Description of Parameters
4-27
Encoder type selection
Control mode FOCPM
Factory default: 3
Settings 0: ABZ
1: ABZ+HALL (only used for Delta’s servo motors)
2: ABZ+HALL
3: Resolver
Look up table for Encoders & PG cards
Parameter Setting Encoder Type Applicable PG Card
01-26=0
A, B, Z EMVJ-PG01U
01-26=1,2
A, B, Z+U, V, W EMVJ-PG01U
01-26=3
Resolver EMVJ-PG01/02R
PG Offset angle of synchronous motor
Control mode FOCPM
Factory default: 0.0
Settings 0.0~360.0°
Offset angle of the PG origin for the synchronous motor.
Number of poles of the resolver
Control mode FOCPM
Factory default: 1
Settings 1~5
Encoder Pulse
Control mode FOCPG FOCPM
Factory default: 1024
Settings 1~20000
This parameter can be set the encoder's number of pulses per revolution (PPR).
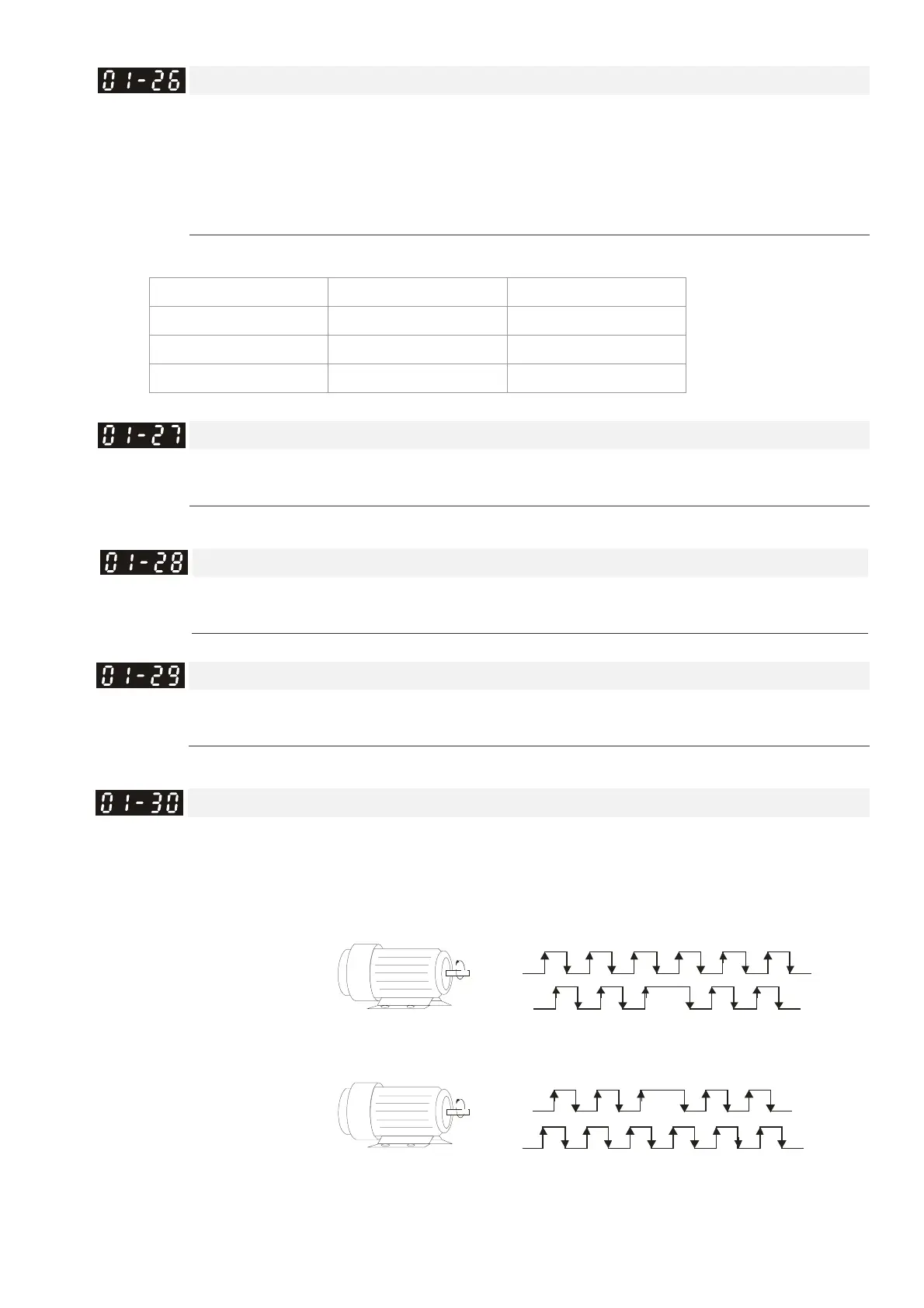
Encoder’s input type setting
Control mode FOCPG FOCPM
Factory default: 1
Settings 0: No function
1: Phase A leads in a forward run command and phase B leads in a reverse
run command.
Forward
Rotation
A
B
Forward Rotation
Reverse Rotation
2: Phase B leads in a forward run command and phase A leads in a reverse
run command.
Forward
Rotation
Forward Rotation
Reverse Rotation
A
 Loading...
Loading...