1BHFt%3*45&&.7BQPSMPHJD*OTUBMMBUJPOBOE0QFSBUJPO.BOVBM
.PECVT#"$OFU-PO5BML
JOUFSPQFSBCJMJUZ
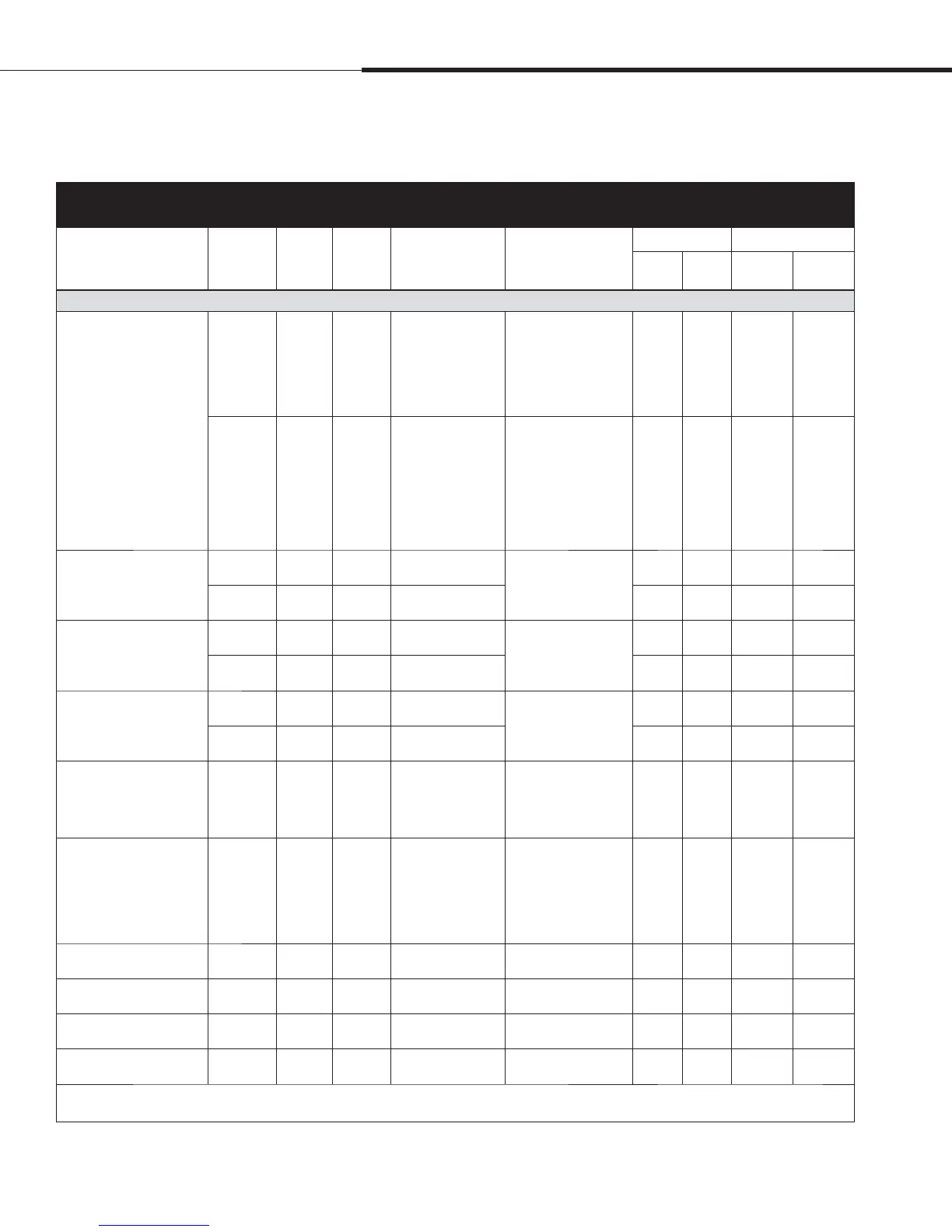
Table 71-1:
Interoperability variable and object names (continued)
Variable name and
BACnet object name
Read Only
(RO) or
Read Write
(RW)
Modbus
register
number*
BACnet
Object
Type and
Instance
LonTalk variable
names**
Description Units Range
I-P
units
SI units I-P units SI units
Setup variables
Run_mode
Write
HR-1
40001
MSV-01 nviRunMode
Mode of the unit or
system. The defined
options are:
1 Auto
2 Local standby
3 System standby
4 Manual drain
-- -- 1 to 4 1 to 4
Read
HR-1
40001
MSV-01 nvoRunMode
Mode of the unit or
system. The defined
options are:
1 Auto
2 Local standby
3 System standby
4 Manual drain
5 Test outputs
6 Test run
-- -- 1 to 6 1 to 6
Space_RH_set_point
Write
HR-2
40002
AV-05 nviSpaceRHsetPt
Humidity set point
for the space being
humidified.
% % 0 to 100 0 to 100
Read
HR-2
40002
AV-05 nvoSpaceRHsetPt % % 0 to 100 0 to 100
Space_dew_point_set_point
Write
HR-3
40003
AV-06 nviSpaceDewPtSP
Dew point set point
for the space being
humidified.
ºF ºC 20 to 80 -6 to 26
Read
HR-3
40003
AV-06 nvoSpaceDewPtSP ºF ºC 20 to 80 -6 to 26
Duct_high_limit_set_point
Write
HR-4
40004
AV-07 nviDuctHLsetPt
Duct high limit set point.
% % 0 to 100 0 to 100
Read
HR-4
40004
AV-07 nvoDuctHLsetPt % % 0 to 100 0 to 100
Fieldbus_demand_mass Write Only
HR-5
40005
AV-08 nviFbusDemndMass
Steam output (as
demanded via the
fieldbus) as a percentage
of the humidifier’s total
capacity.
lbs/hr kg/h
0 to
100,000
0 to
100,000
Fieldbus_demand_% Write Only
HR-6
40006
AV-09 nviFldBusDemand%
Steam output (as
demanded via fieldbus)
in pounds or kilograms
per hour. If the request
exceeds the unit’s
capacity, the unit will run
at 100% capacity.
% % 0 to 100 0 to 100
PID_band RW
HR-7
40007
AV-10 nciPIDband PID band. % % 0 to 50 0 to 50
PID-Kp RW
HR-8
40008
AV-11 nciPIDkp
PID-Kp (proportional
gain) factor.
-- -- 0 to 1000 0 to 1000
PID-Ki RW
HR-9
40009
AV-12 nciPIDki
PID-Ki (integral gain)
factor.
-- -- 0 to 1000 0 to 1000
PID-Kd RW
HR-10
40010
AV-13 nciPIDkd
PID-Kp (derivative gain)
factor.
-- -- 0 to 1000 0 to 1000
* See Note 1 on Page 76.
** See Note 2 on Page 76.
Continued
Operation
 Loading...
Loading...