Section 50 00-02-1032
2020-12-08 - 25 -
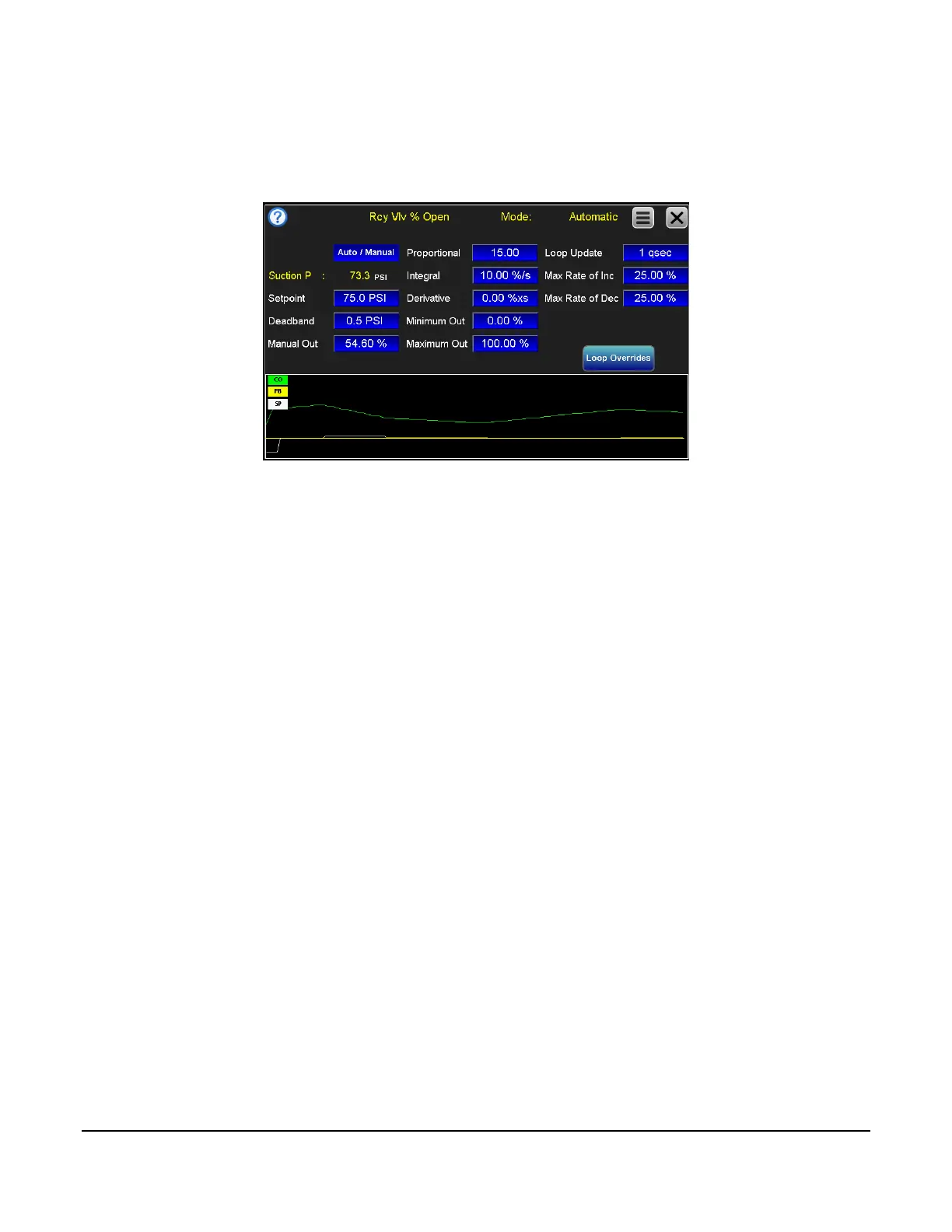
Control Loop Typical
The pen chart shows the PID output (CO), Feedback (FB) and Setpoint over the last 2 minutes. Use this to help
tune the closed loop control.
Press the Auto/Manual button change modes. In automatic, the control loop will try to maintain the setpoint +/- the
deadband using calculation against the error (how far away from setpoint) of the loop.
Press the Manual Out edit box to set a desired output in manual if desired.
P = tunes for the Error at present condition.
I = adjust the output value on the accumulated error over time.
D = affects the output value based on the rate of change of the error.
Bigger numbers will result in larger changes in output %. General tuning guidelines start with I and D at low
numbers, using only proportional. Once ringing is seen, reduce P slightly and increase I slowly. D may be
introduced as a predictive measure, derivative adjust the output based on how much the error is changing in a
given calculation loop.
Output ramp rates and min/max calculation limits are adjustable. Press loop overrides to adjust any possible
control loop override factors.
The controller uses the parallel form of the PID equation as follows:
% Output = Kp(Error) + Ki∫(Error)dt + Kd×dError∕dt

 Loading...
Loading...