24 • Chapter 2 Getting Started DMC-1500
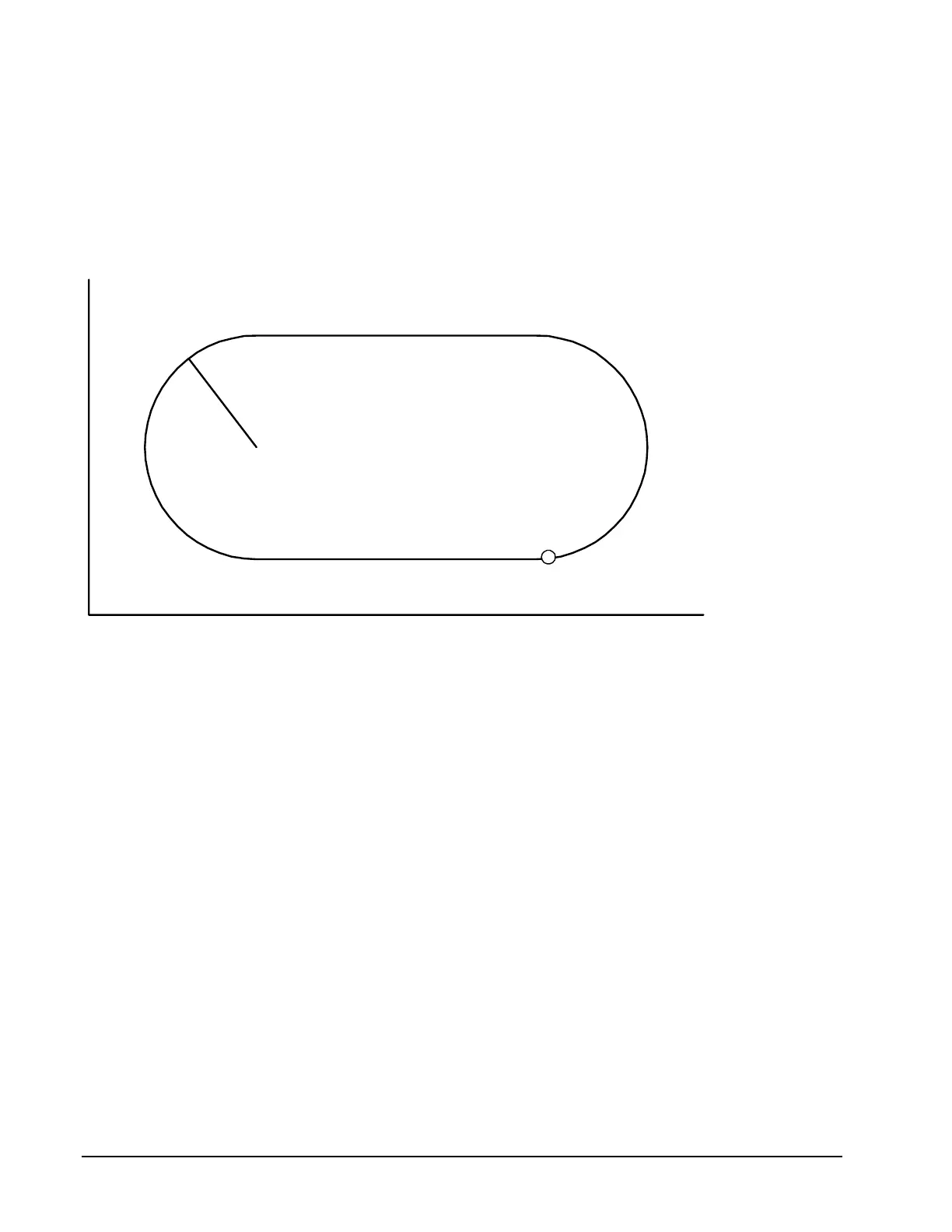
CR 2000,90,-180 Circular segment
VS 1000 Vector speed
VA 50000 Vector acceleration
VD 50000 Vector deceleration
VE End vector sequence
BGS Start motion
X
Y
R=2000
(0,0) local zero(-4000,0)
(-4000,4000) (0,4000)
Figure 2-4 Motion Path for Example 16
 Loading...
Loading...

