DMC-1500 Chapter 6 Programming Motion • 69
of the buffer. The command, DP sets the value of the step count register as well as the value of the
reference position. For example, DP 0, defines the reference position of the X axis to be zero.
Motion Complete Trippoint
When used in stepper mode, the MC command will hold up execution of the proceeding commands
until the controller has generated the same number of steps out of the step count register as specified in
the commanded position. The MC trippoint (Motion Complete) is generally more useful than AM
trippoint (After Motion) since the step pulses can be delayed from the commanded position due to
stepper motor smoothing.
Using an Encoder with Stepper Motors
An encoder may be used on a stepper motor to check the actual motor position with the commanded
position. If an encoder is used, it must be connected to the main encoder input. Note: The auxiliary
encoder is not available while operating with stepper motors. The position of the encoder can be
interrogated by using the command, TP. The position value can be defined by using the command,
DE. Note: Closed loop operation with a stepper motor is not possible.
Command Summary - Stepper Motor Operation
COMMAND DESCRIPTION
DE Define Encoder Position (When using an encoder)
DP Define Reference Position and Step Count Register
IT Motion Profile Smoothing - Independent Time Constant
KS Stepper Motor Smoothing
MT Motor Type (2,-2,2.5 or -2.5 for stepper motors)
RP Report Commanded Position
TD Report number of step pulses generated by controller
TP Tell Position of Encoder
Operand Summary - Stepper Motor Operation
OPERAND DESCRIPTION
_DEx Contains the value of the step count register
_DPx Contains the value of the main encoder
_ITx Contains the value of the Independent Time constant for the 'x' axis
_KS Contains the value of the Stepper Motor Smoothing Constant for the 'x' axis
_MT Contains the motor type value for the 'x' axis
_RP Contains the commanded position generated by the profiler
_TD Contains the value of the step count register
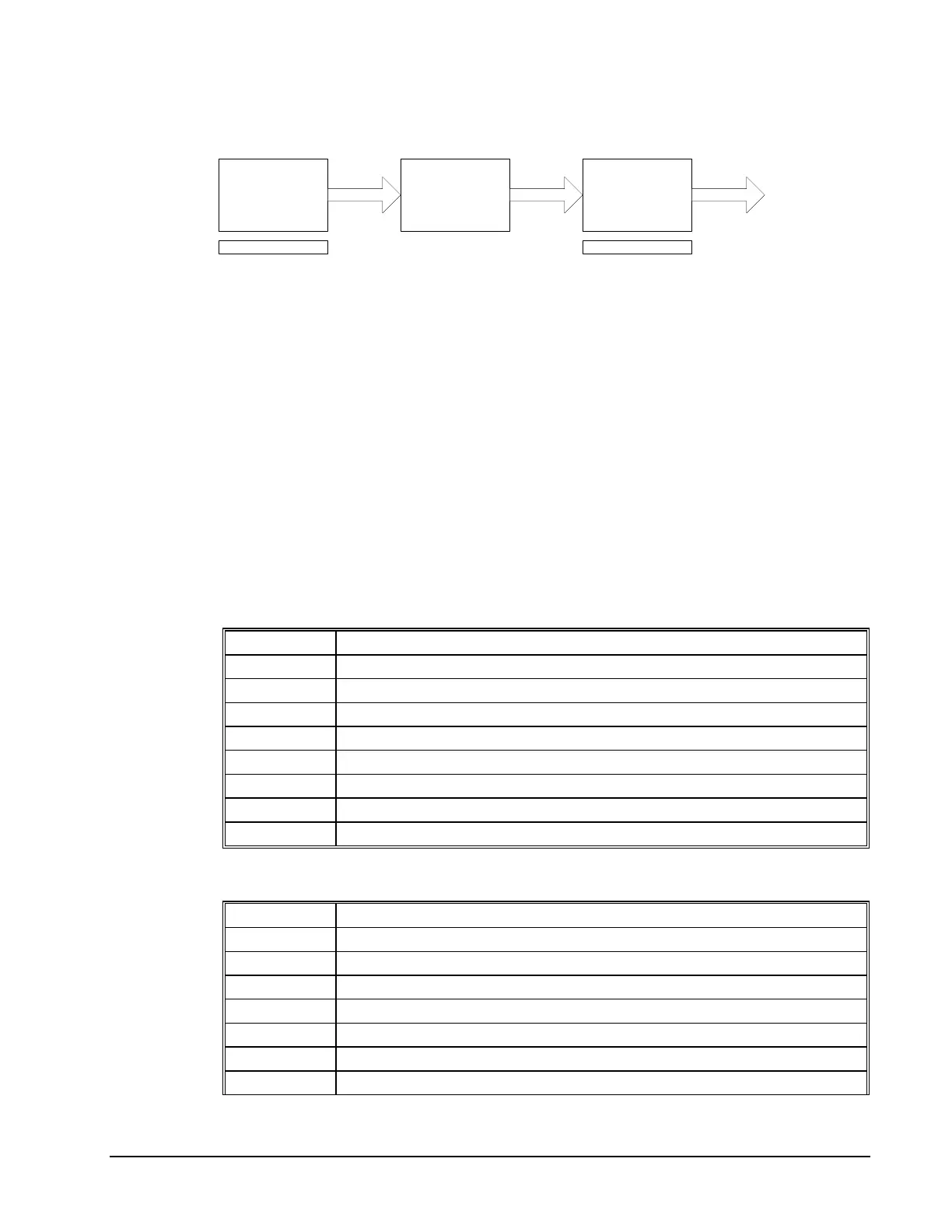
Motion Profiler
Stepper Smoothing Filter
(Adds a Delay)
Output Buffer
Step Count Register (TD)Reference Position (RP)
Output
(To Stepper Driver)