72 • Chapter 6 Programming Motion DMC-1500
BGX Start motion
#Correct Correction loop
AMX Wait for motion completion
V1=10000-_DEX Find linear encoder error
V2=-_TEX/4+V1 Compensate for motor error
JP#END,@ABS[V2]<2 Exit if error is small
PR V2*4 Correction move
BGX Start correction
JP#CORRECT Repeat
#END
EN
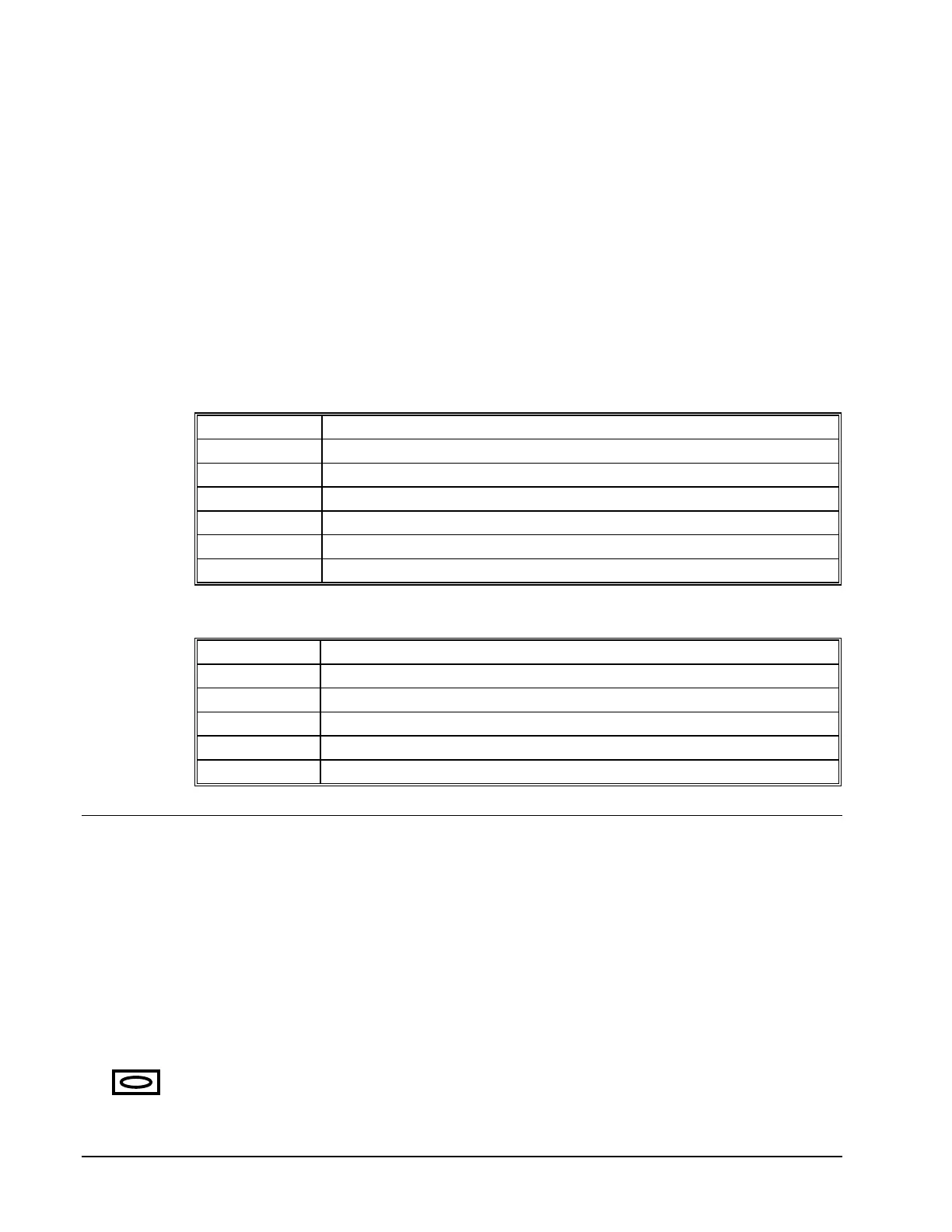
Command Summary - Using the Auxiliary Encoder
COMMAND DESCRIPTION
CE Configure Encoder Type
DE Define dual (auxiliary) encoder position
DV Set continuous dual loop mode - see description below
GA Set master axis for gearing - the auxiliary encoder input can be used for gearing
GR Set gear ratio for gearing - the auxiliary encoder input can be used for gearing
TD Tell dual (auxiliary) encoder input position.
Operand Summary - Using the Auxiliary Encoder
OPERAND DESCRIPTION
_CEx Contains the encoder configuration for the specified axis
_DEx Contains the current position of the specified auxiliary encoder
_DVx Contains a '1' or '0' if the specified axis is in continuous dual loop operation.
_GRx Contains the value of the gear ratio for the specified axis
_TDx Contains the position of the specified auxiliary encoder.
Motion Smoothing
The DMC-1500 controller allows the smoothing of the velocity profile to reduce the mechanical
vibration of the system.
Trapezoidal velocity profiles have acceleration rates which change abruptly from zero to maximum
value. The discontinuous acceleration results in jerk which causes vibration. The smoothing of the
acceleration profile leads to a continuous acceleration profile and reduces the mechanical shock and
vibration.
Using the IT and VT Commands (S curve profiling):
When operating with servo motors, motion smoothing can be accomplished with the IT and VT
command. These commands filter the acceleration and deceleration functions to produce a smooth
velocity profile. The resulting velocity profile, known as S curve, has continuous acceleration and
results in reduced mechanical vibrations.