DMC-1500 Chapter 6 Programming Motion • 55
The command GAX or GAY or GAZ or GAW (or GAA or GAB or GAC or GAD or GAE or GAF or
GAG or GAH for DMC-1580) specifies the master axis. There may only be one master. GR x,y,z,w
specifies the gear ratios for the slaves where the ratio may be a number between +/-127.9999 with a
fractional resolution of .0001. GR 0,0,0,0 turns off electronic gearing for any set of axes. A limit
switch will also disable electronic gearing for that axis. GR causes the specified axes to be geared to
the actual position of the master. The master axis is commanded with motion commands such as PR,
PA or JG.
When the master axis is driven by the controller in the jog mode or an independent motion mode, it is
possible to define the master as the command position of that axis, rather than the actual position. The
designation of the commanded position master is by the letter, C. For example, GACX indicates that
the gearing is the commanded position of X.
An alternative gearing method is to synchronize the slave motor to the commanded vector motion of
several axes performed by GAS. For example, if the X and Y motor form a circular motion, the Z axis
may move in proportion to the vector move. Similarly, if X,Y and Z perform a linear interpolation
move, W can be geared to the vector move.
Electronic gearing allows the geared motor to perform a second independent or coordinated move in
addition to the gearing. For example, when a geared motor follows a master at a ratio of 1:1, it may be
advanced an additional distance with PR, or JG, commands, or VP, or LI.
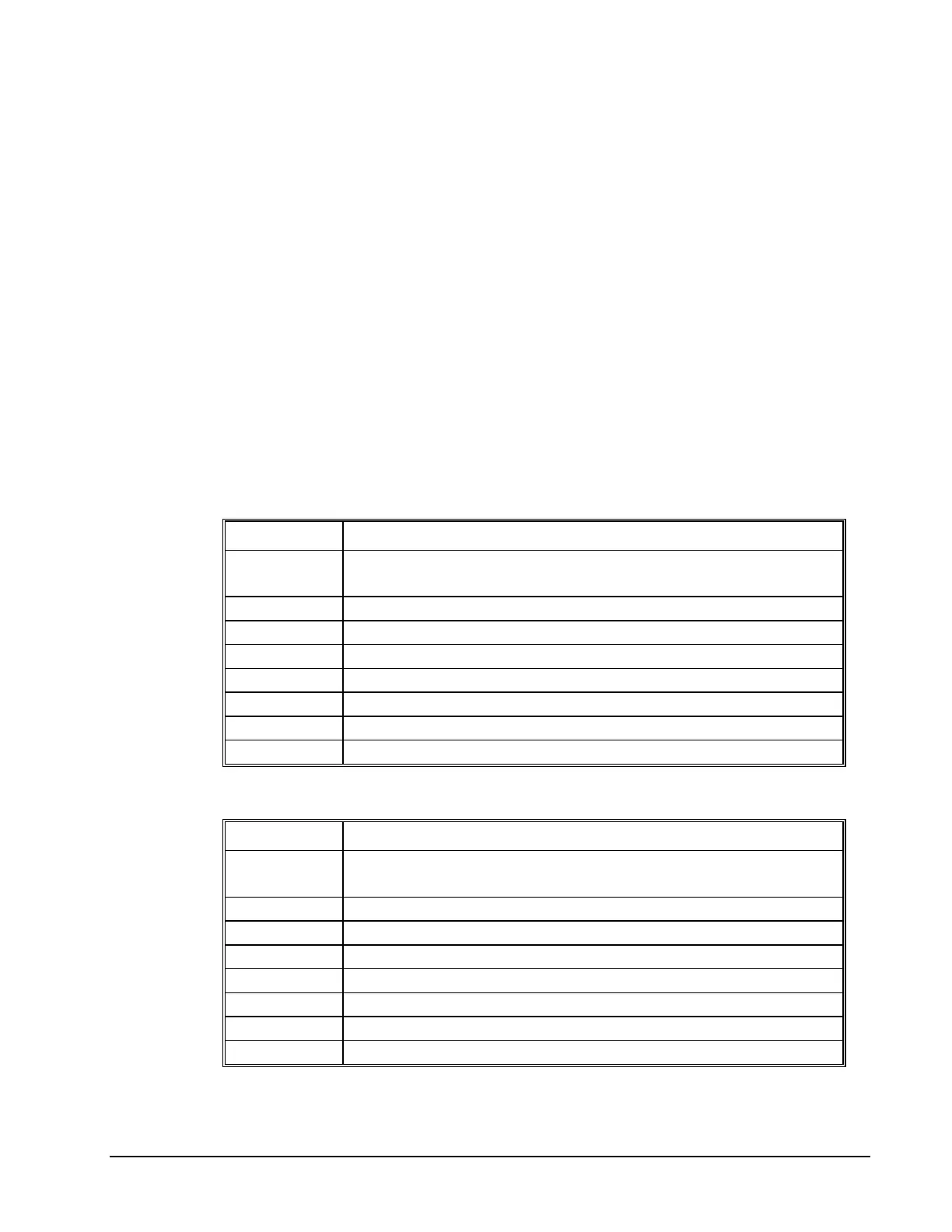
Command Summary - Electronic Gearing
COMMAND DESCRIPTION
GA n Specifies master axis for gearing where:
n = X,Y,Z or W or A,B,C,D,E,F,G,H for main encoder as master
n = XC,YC,ZC or WC or AC, BC, CC, DC, EC, FC,GC,HC for commanded position.
n = DX,DY,DZ or DW or DA, DB, DC, DD, DE, DF,DG,DH for auxiliary encoders
n = S vector move as master
GR x,y,z,w Sets gear ratio for slave axes. 0 disables electronic gearing for specified axis.
GR a,b,c,d,e,f,g,h Sets gear ratio for slave axes. 0 disables electronic gearing for specified axis.
MR x,y,z,w Trippoint for reverse motion past specified value. Only one field may be used.
MF x,y,z,w Trippoint for forward motion past specified value. Only one field may be used.
Operand Summary - Electronic Gearing
COMMAND DESCRIPTION
GA n Specifies master axis for gearing where:
n = X,Y,Z or W or A,B,C,D,E,F,G,H for main encoder as master
n = XC,YC,ZC or WC or AC, BC, CC, DC, EC, FC,GC,HC for commanded position.
n = DX,DY,DZ or DW or DA, DB, DC, DD, DE, DF,DG,DH for auxiliary encoders
n = S vector move as master
GR x,y,z,w Sets gear ratio for slave axes. 0 disables electronic gearing for specified axis.
GR a,b,c,d,e,f,g,h Sets gear ratio for slave axes. 0 disables electronic gearing for specified axis.
MR x,y,z,w Trippoint for reverse motion past specified value. Only one field may be used.
MF x,y,z,w Trippoint for forward motion past specified value. Only one field may be used.