DMC-1500 Chapter 6 Programming Motion • 73
The smoothing function is specified by the following commands:
IT x,y,z,w Independent time constant
VT n Vector time constant
The command, IT, is used for smoothing independent moves of the type JG, PR, PA and the
command, VT, is used to smooth vector moves of the type VM and LM.
The smoothing parameters, x,y,z,w and n are numbers between 0 and 1 and determine the degree of
filtering. The maximum value of 1 implies no filtering, resulting in trapezoidal velocity profiles.
Smaller values of the smoothing parameters imply heavier filtering and smoother moves.
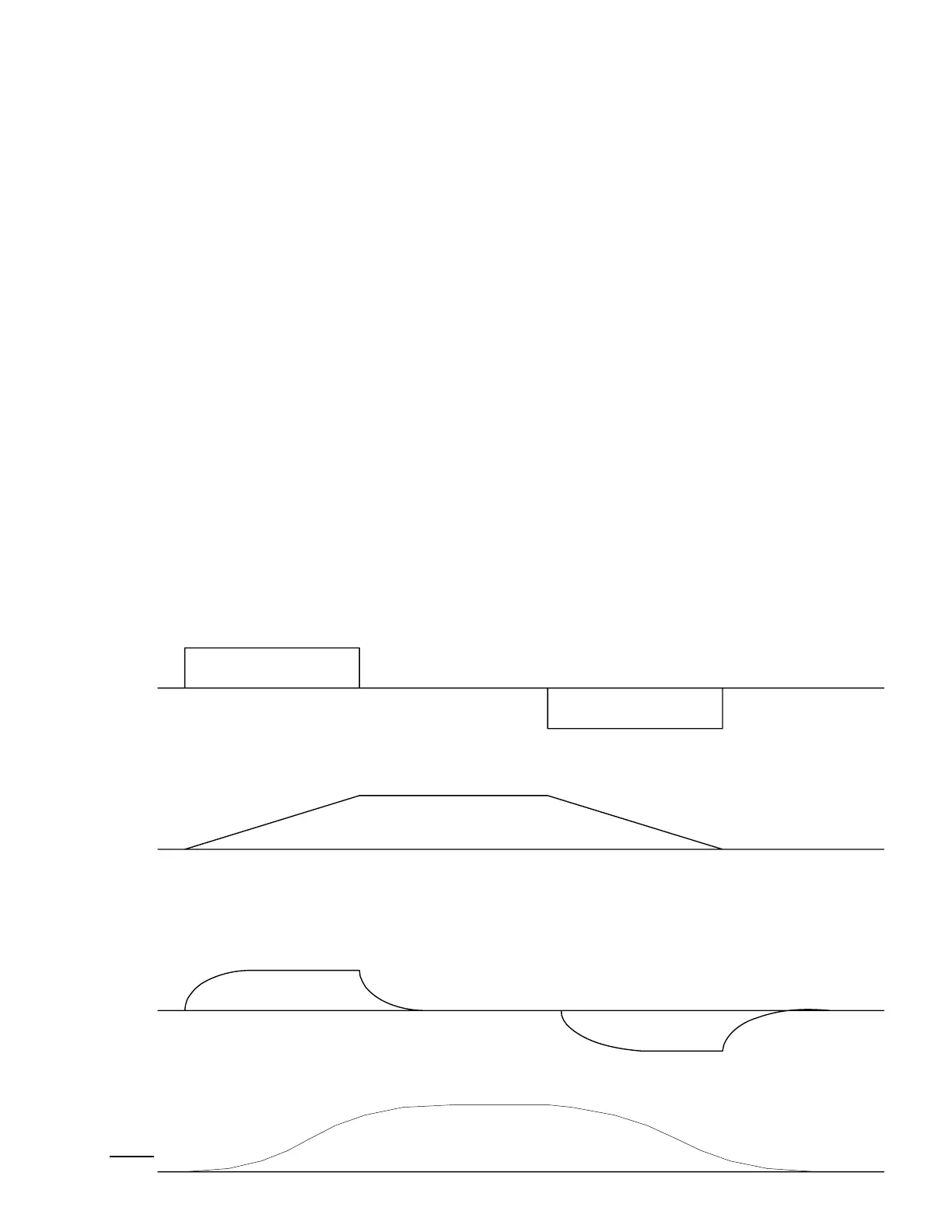
The following example illustrates the effect of smoothing. Fig. 6.6 shows the trapezoidal velocity
profile and the modified acceleration and velocity.
Note that the smoothing process results in longer motion time.
Example - Smoothing
Instruction Interpretation
PR 20000 Position
AC 100000 Acceleration
DC 100000 Deceleration
SP 5000 Speed
IT .5 Filter for S-curve
BG X Begin
ACCELERATION
VELOCITY
VELOCITY
VELOCITY
ACCELERATION
 Loading...
Loading...

