X86 Open Platform·User Manual
1
Chapter 1 Overview
1.1 Appearance
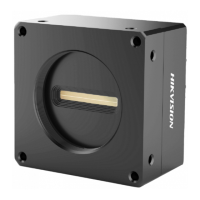
The dimension of the X86 open platform without light source and lens cover is shown in Figure
1-1.
Figure 1-1 X86 Open Platform without Light Source and Lens Cover
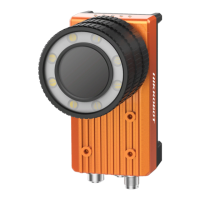
The dimension of the X86 open platform with light source and lens cover is shown in Figure 1-2.
Figure 1-2 X86 Open Platform with Light Source and Lens Cover
The device has 4 screw holes that are used to fix the device to the mounting bracket. It is
recommended to use supplied M4 screws to fix the device. Otherwise, you are recommended to
use metric M4 screws, and the length of screws should be shorter than the total length of
mounting bracket thickness and screw hole depth.