Chapter 4 Explanation of Functions
4-99
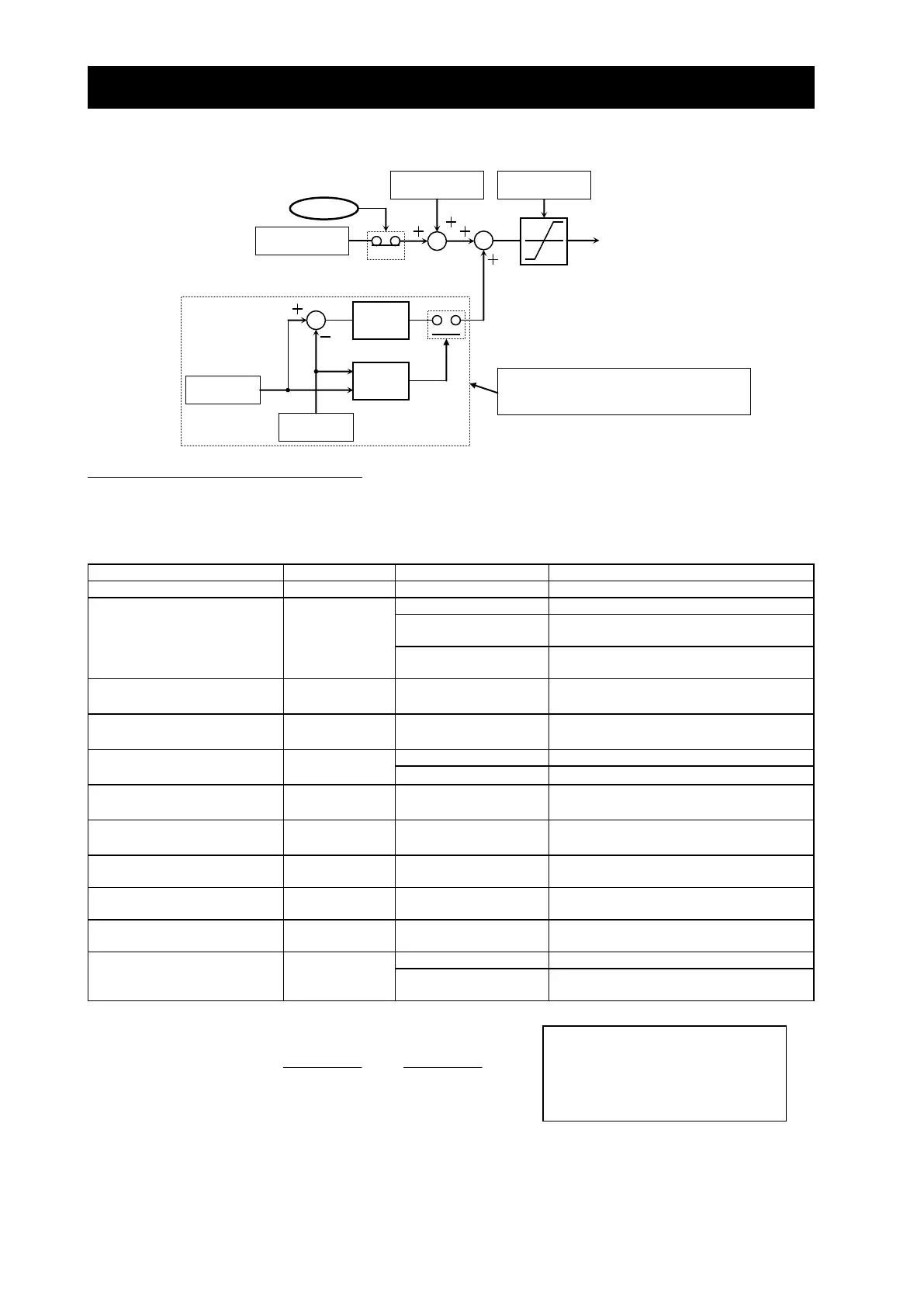
<Control block diagram>
4.3.6 Pulse train position control mode
- To use this function, specify "05" (V2) for V/F characteristic curve selection, 1st motor (A044) and "01" (pulse train
position control mode) for the control pulse setting (P012).
- You can choose the input source of pulse train command pulse train mode setting (P013).
Pulse train position control mode
Pulse train mode setting (*2)
MD0: 90-phase-shift pulse train
MD1: Forward/reverse operation command
with pulse train
MD2: Forward-operation pulse train with
reverse-operation pulse train
Home search completion range
setting
0. to 9999. / 1000
(100000)
Equivalent to encoder quadruplex
Home search completion delay
time setting
Electronic gear set position
selection
Electronic gear ratio numerator
setting
Electronic gear ratio
denominator setting
Feed-forward gain setting
0.00 to 99.99 / 100.0 to
655.3
Position loop gain setting
0.00 to 99.99 / 100.0
(rad/s)
-204 (-2048) / -999. to
2048.
PCLR: Clearance of position deviation data
STAT: Pulse train position command input
enable
*1 In pulse train position control mode, the frequency value of a frequency command is calculated as follows:
Frequency command (Hz) =
In position control mode, the setting for the acceleration and deceleration time is invalid. (The LAD cancellation
function operates automatically to ignore acceleration and deceleration patterns.) When the position loop gain is
larger, the acceleration/deceleration time is shorter.
Torque command
(Current control command)
Speed
control
(P control)
If the detected speed exceeds the speed
limit, the motor speed is controlled in
proportional (P) control mode.
P: Number of poles of the motor
Kv: Position loop gain
ENC: Encoder pulse count
ΔP: Position deviation

 Loading...
Loading...






