23
14. Relationship of Load and Weight
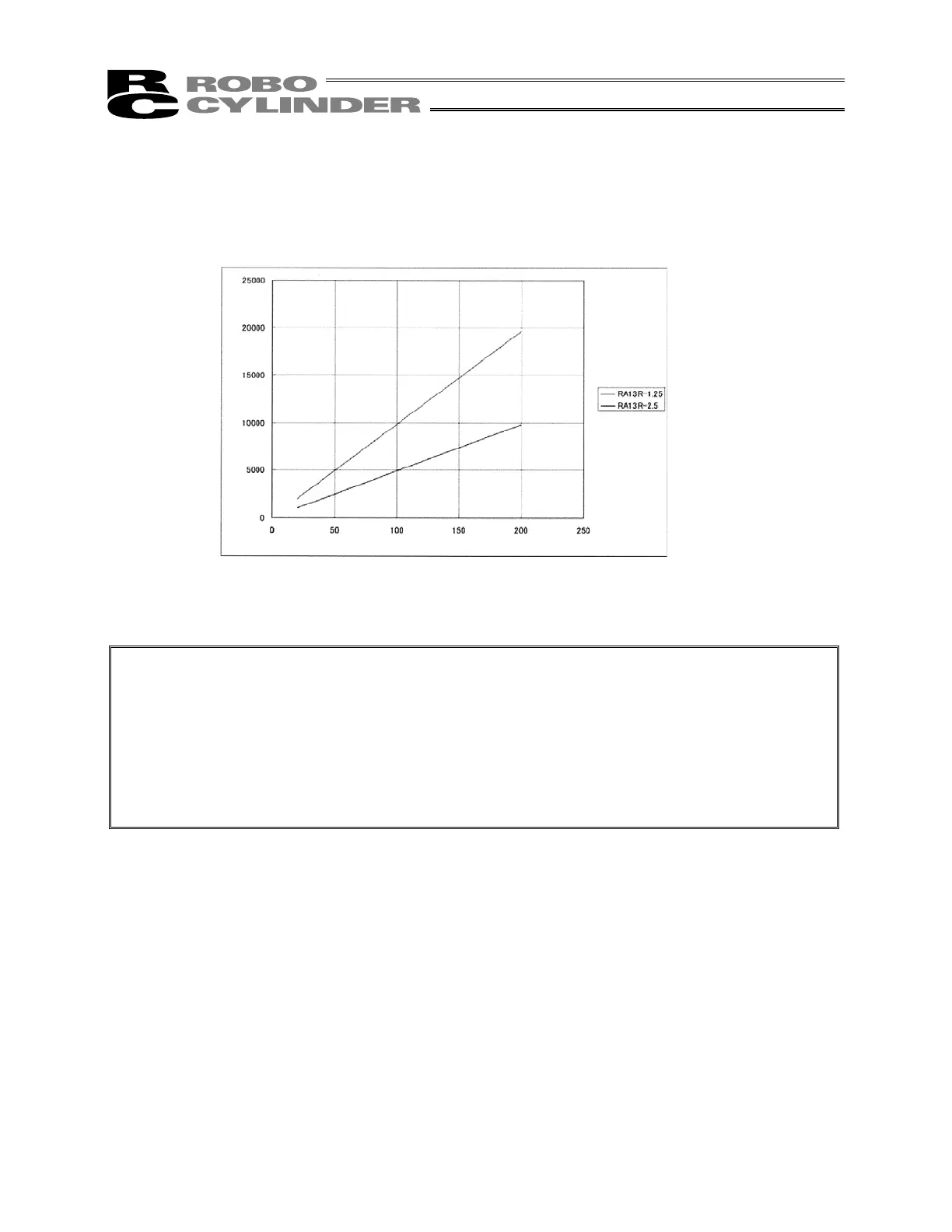
The push force to be applied during push-motion operation can be changed freely by changing the
current-limiting value on the controller.
Caution: This diagram of push force and current-limiting value is provided as a reference. Actual
values may vary slightly from the diagram.
Keep the current-limiting value at 20% or above, because any lower setting may cause the
push force to fluctuate.
The traveling speed is fixed to 10 mm/s during push-motion operation.
This diagram assumes a push speed of 10 mm/s. Take note that the push force may
decrease when a different push speed is used.
Depending on the operating conditions, the push force may also decrease when the motor
temperature rises.
Current-limiting value (%)
Push force (N)
 Loading...
Loading...






