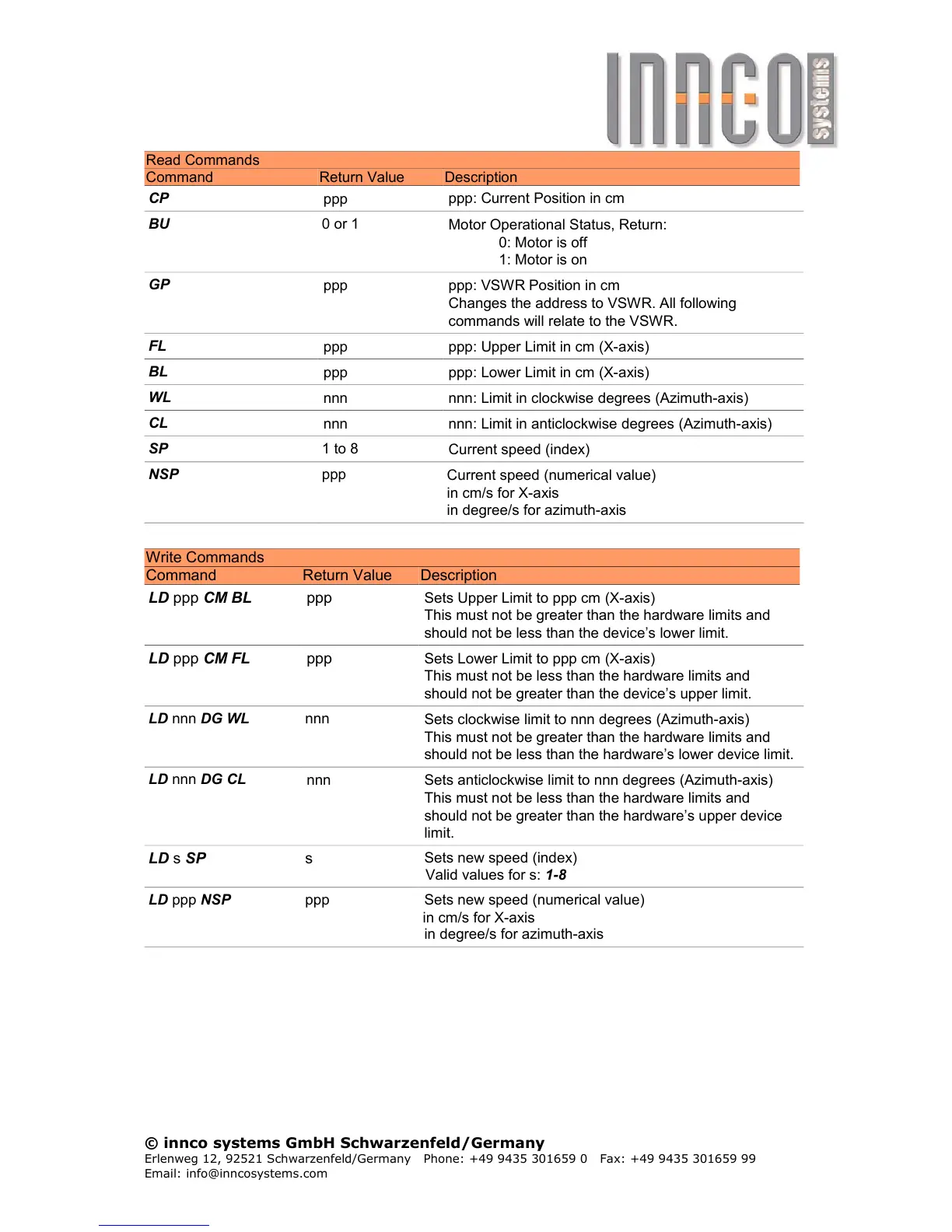
Read Commands
Command Return Value Description
CP
ppp
ppp: Current Position in cm
BU 0 or 1
Motor Operational Status, Return:
0: Motor is off
1: Motor is on
GP
ppp ppp: VSWR Position in cm
Changes the address to VSWR. All following
commands will relate to the VSWR.
FL
ppp ppp: Upper Limit in cm (X-axis)
BL
ppp ppp: Lower Limit in cm (X-axis)
WL
nnn nnn: Limit in clockwise degrees (Azimuth-axis)
CL
nnn nnn: Limit in anticlockwise degrees (Azimuth-axis)
SP 1 to 8
Current speed (index)
NSP ppp
Current speed (numerical value)
in cm/s for X-axis
in degree/s for azimuth-axis
Write Commands
Command Return Value Description
LD ppp CM BL ppp Sets Upper Limit to ppp cm (X-axis)
This must not be greater than the hardware limits and
should not be less than the device’s lower limit.
LD ppp CM FL ppp Sets Lower Limit to ppp cm (X-axis)
This must not be less than the hardware limits and
should not be greater than the device’s upper limit.
LD nnn DG WL nnn
Sets clockwise limit to nnn degrees (Azimuth-axis)
This must not be greater than the hardware limits and
should not be less than the hardware’s lower device limit.
LD nnn DG CL
nnn Sets anticlockwise limit to nnn degrees (Azimuth-axis)
This must not be less than the hardware limits and
should not be greater than the hardware’s upper device
limit.
LD s SP s
Sets new speed (index)
Valid values for s: 1-8
LD ppp NSP ppp Sets new speed (numerical value)
in cm/s for X-axis
in degree/s for azimuth-axis
© innco systems GmbH Schwarzenfeld/Germany
Erlenweg 12, 92521 Schwarzenfeld/Germany Phone: +49 9435 301659 0 Fax: +49 9435 301659 99
Email: info@inncosystems.com