OptidriveODP‐2UserGuideRevisions1.30
46
www.invertekdrives.com
9Serialcommunications
9.2.2. ModbusControl&MonitoringRegisters
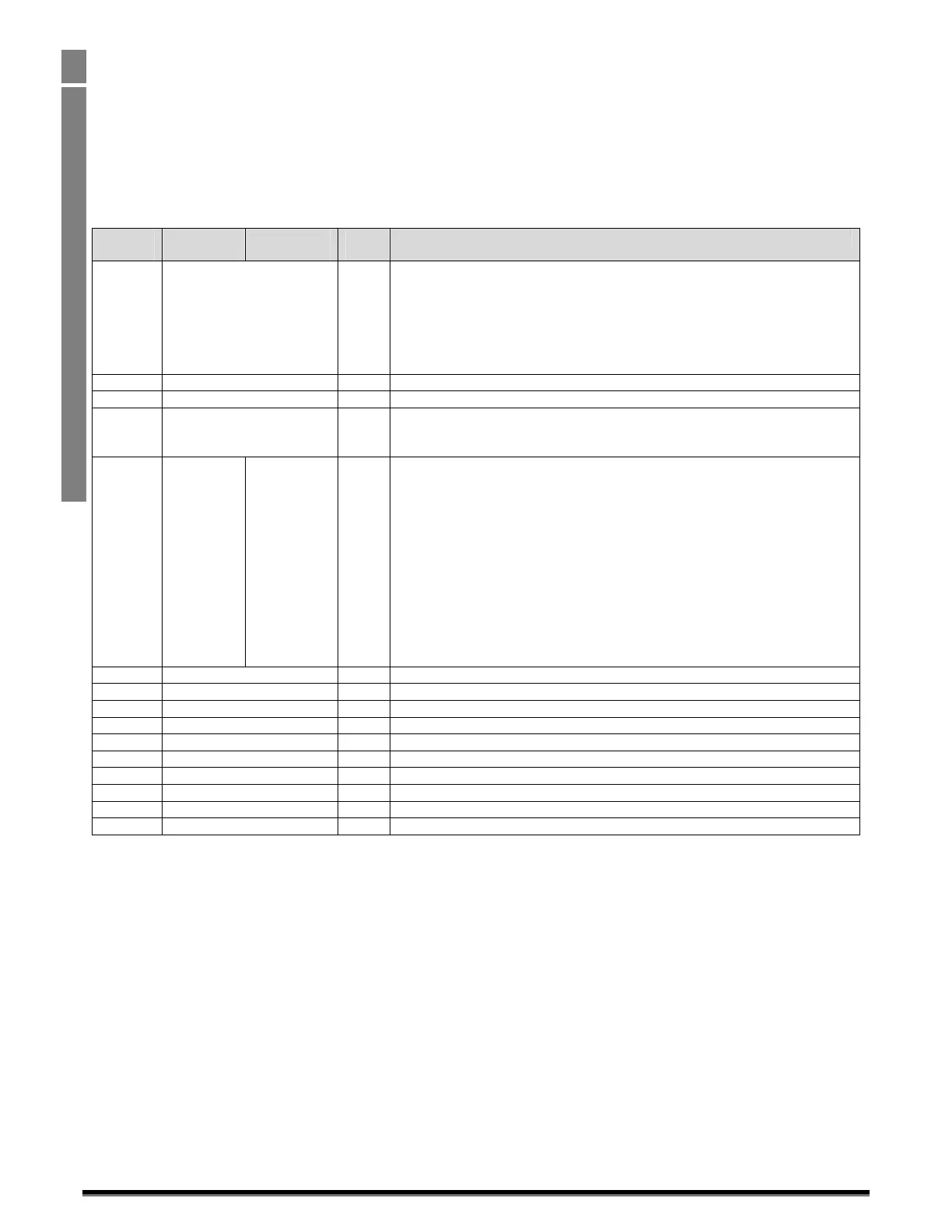
ThefollowingisalistofaccessibleModbusRegistersavailableintheOptidriveP2.
• WhenModbusRTUisconfiguredastheFieldbusoption,allofthelistedregisterscanbeaccessed.
• Registers1and2canbeusedtocontrolthedriveprovidingthatModbusRTUisselectedasth
eprimarycommandsource(P1‐12=4)
andnoFieldbusOptionModuleisinstalledinthedriveOptionSlot.
• Register3canbeusedtocontroltheoutputtorquelevelprovidingthat
o ThedriveisoperatinginVectorSpeedorVectorTorquemotorcontrolmodes(P4‐01=1or2)
o Thetorq
uecontrollerreference/limitissetfor‘Fieldbus’(P4‐06=3)
• Register4canbeusedtocontroltheaccelerationanddecelerationrateofthedriveprovidingthatFieldbusRampControlisenabled
(P5‐07=1)
• Registers6to24canbereadre
gardlessofthesettingofP1‐12
Register
Number
Upper
Byte
Lower
Byte
Read
Write
Notes
1
CommandControlWord R/W Commandcontrolwordusedtocontrol theOptidrivewhenoperatingwithModbus
RTU.TheControlWordbitfunctionsareasfollows:‐
Bit0:Run/Stopcommand.Setto1toenablethedrive.Setto0tostopthedrive.
Bit1:Faststoprequest.Setto1toen
abledrivetostopwith2
nd
decelerationramp.
Bit2:Resetrequest.Setto1inordertoresetanyactivefaultsortripsonthedrive.
Thisbitmustberesettozerooncethefaulthasbeencleared.
Bit3:Coaststoprequest.Setto1toissueacoaststopcommand.
2 CommandSpeedReference R/W SetpointmustbesenttothedriveinHztoonedecimalplace,e.g.500=50.0Hz
3 CommandTorqueReference R/W Setpointmustbesenttothedrivein%toonedecimalplace,e.g.2000=200.0%
4
CommandRamptimes R/W Thisregisterspecifiesthedriveaccelerationanddecelerationramptimesusedwhen
FieldbusRampControlisselected(P5‐08=1)irrespectiveofthesettingofP1‐12.
Theinputdatarangeisfrom0to60000(0.00sto600.00s)
6
Errorcode Drivestatus R Thisregistercontains2bytes.
TheLowerBytecontainsan8bitdrivestatuswordasfollows:‐
Bit0:0=DriveDisabled(Stopped),1=DriveEnabled(Running)
Bit1:0=DriveHealthy,1=DriveTripped
Bit2:NoFunction
Bit3:Driv
eReady,1=DriveInhibit
Bit4:MaintenanceTimeNotReached,1=MaintenanceTimeReached
Bit5:0=NotInStandby(Sleep),1=Standby(Sleep)modeactive
Bit6:Nofunction
Bit7:NoFunction
Bit8:NoFunction
TheUpperBytewillco
ntaintherelevantfaultnumberintheeventofadrivetrip.
Refertosection11.1foralistoffaultcodesanddiagnosticinformation
7 OutputFrequency R Outputfrequencyofthedrivetoonedecimalplace,e.g.123=12.3Hz
8 OutputCurrent R Outputcurrentofthedrivetoonedecimalplace,e.g.105=10.5Amps
9 OutputTorque R Motoroutputtorqueleveltoonedecimalplace,e.g.474=47.4%
10 OutputPower R Outputpowerofthedrivetotwodecimalplaces,e.g.1100=11.00kW
11 DigitalInputStatus R RepresentsthestatusofthedriveinputswhereBit0=DigitalInput1etc.
20 Analog1Level R AnalogInput1AppliedSignallevelin%toonedecimalplace,e.g.1000=100.0%
21 Analog2Level R AnalogInput2AppliedSignallevelin%toonedecimalplace,e.g.1000=100.0%
22 PreRampSpeedReference R Internaldrivefrequencysetpoint
23 DCbusvoltages R MeasuredDCBusVoltageinVolts
24 Drivetemperature R MeasuredHeatsinkTemperaturein°C
9.2.3. ModbusParameterAccess
AllUserAdjustableparameters(Groups1to5)areaccessiblebyModbus,exceptthosethatwoulddirectlyaffecttheModbuscommunications,
e.g.
• P5‐01CommunicationProtocolSelect
• P5‐02DriveFieldbusAddress
• P5‐03ModbusRTUBaudRate
• P5‐04ModbusRTUDataFormat
Allparametervaluescanbereadfromth
edriveandwrittento,dependingontheoperatingmodeofthedrive–someparameterscannotbe
changedwhilstthedriveisenabledforexample.
WhenaccessingadriveparameterviaModbus,theRegisternumberfortheparameteristhesameastheparameternumber,
E.g.ParameterP1‐01=M
odbusRegister101.
ModbusRTUsupportssixteenbitintegervalues,hencewhereadecimalpointisusedinthedriveparameter,theregistervaluewillbe
multipliedbyafactoroften,
E.g.ReadValueofP1‐01=500,thereforethisis50.0Hz.
Forfurth
erdetailsoncommunicatingwithOptidriveusingModbusRTU,plea serefertoyourlocalInvertekSalesPartner.
 Loading...
Loading...

