OptidriveODP‐2UserGuideRevisions1.30
22
www.invertekdrives.com
4ElectricalInstallation
4.10. SafeTorqueOff
SafeTorqueOFFwillbereferredtoas“STO”throughtheremainderofthissection.
4.10.1. Responsibilities
Theoverallsystemdesignerisresponsiblefordefiningtherequirementsof the overall“SafetyControlSystem”withinwhichthedrivewillbe
incorporated; furthermore the system designer is responsible for ensuring that the complete system is risk assessed and that the “Safety
controlSystem”requirementshavebeenentirelymetandthatth
efunctionisfullyverified,thismustincludeconfirmationtestingofthe“STO”
functionbeforedrivecommissioning.
Thesystemdesignershalldeterminethepossiblerisksandhazardswithinthesystembycarryingout athoroughriskandhazardanalysis,the
outcomeof theanalysisshould providean estimateof thepossiblehazards,fu
rthermoredeterminetherisklevelsandidentify anyneedsfor
riskreduction.The“STO”functionshouldbeevaluatedtoensureitcansufficientlymeettherisklevelrequired.
4.10.2. WhatSTOProvides
Thepurposeofthe“STO“functionistoprovideamethodofpreventingthedrivefromcreatingtorqueinthemotorintheabsenceofthe“STO“
inputsignals(Terminal12withrespecttoTerminal13),thisallowsthedrivetobeincorporatedintoacompletesafetycontrolsystemwhere
“STO“re
quirementsneedtobefulfilled.
1
The“STO“functioncantypicallyeliminatetheneedforelectro‐mechanicalcontactorswithcross‐checkingauxiliarycontactsaspernormally
requiredtoprovidesafetyfunctions.
2
Thedrivehasthe“STO“Functionbuilt‐inasstandardandcomplieswiththedefinitionof“Safetorqueoff“asdefinedbyIEC61800‐5‐2:2007.
The“STO“Functionalsocorrespondstoanuncontrolledstopinaccordancewithcategory0(EmergencyOff),ofIEC60204‐1.Thismeansthat
themotorw
illcoasttoastopwhenthe“STO”functionisactivated,thismethodofstoppingshouldbeconfirmedasbeingacceptabletothe
systemthemotorisdriving.
The“STO“functionisrecognisedasafailsafemethodeveninthecasewherethe“STO“signalisabsentandasi
nglefaultwithinthedrivehas
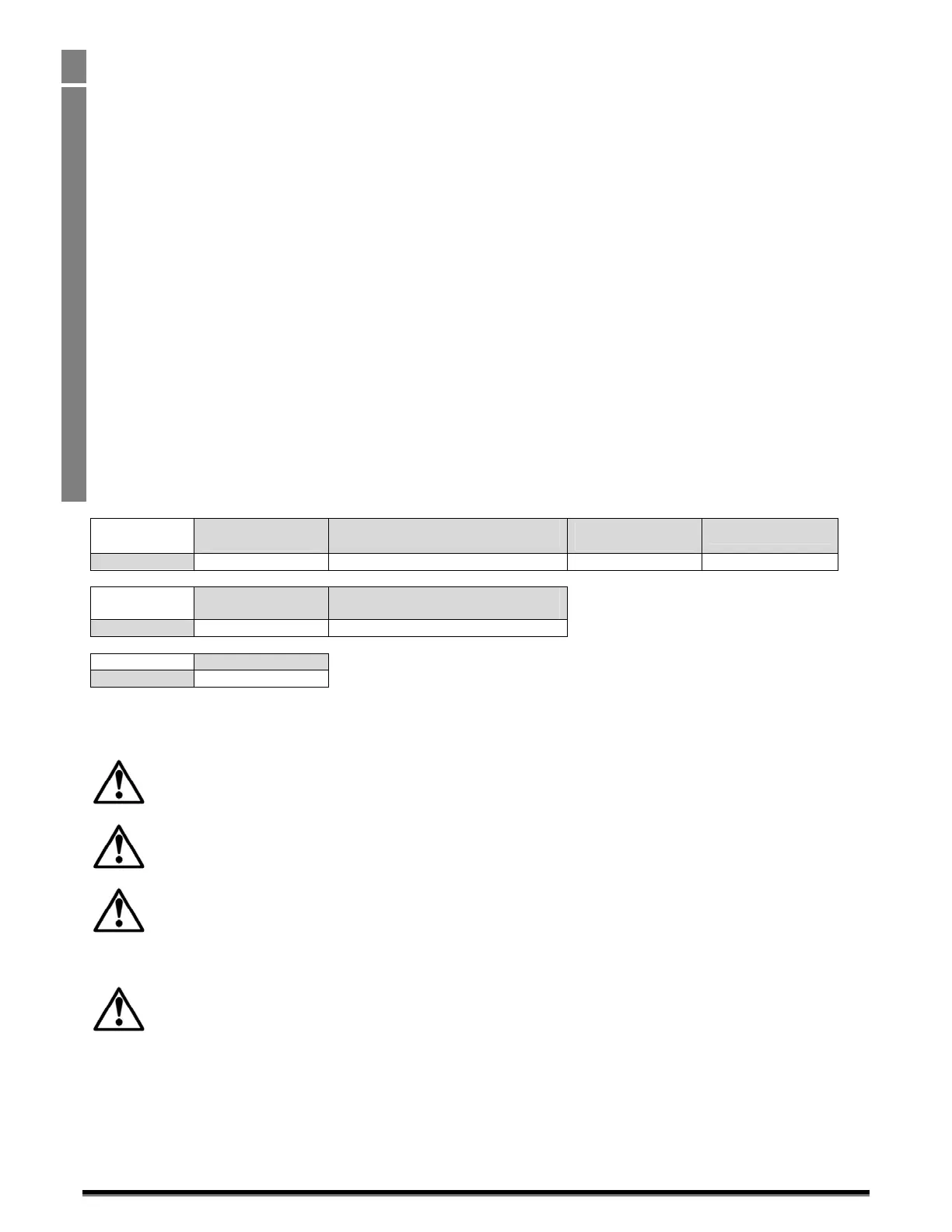
occured,thedrivehasbeenproveninrespectofthisbymeetingthefollowingsafetystandards:
SIL
(SafetyIntegrityLev el)
PFH
D
(ProbabilityofdangerousFailuresperHour)
SFF
(Safefailurefraction%)
Lifetimeassumed
EN61800‐5‐2 2 1.23E‐091/h(0.12%ofSIL2) 50 20Yrs
PL
(Performancelevel)
CCF(%)
(CommonCauseFailure)
ENISO13849‐1 PLd 1
SILCL
EN62061 SILCL2
Note:ThevaluesacheivedabovemaybejepardisedifthedriveisinstalledoutsideoftheEnvironmentallimitsdetailedinsection10.1
“Environmental“.
4.10.3. WhatSTOdoesnotprovide
DisconnectandISOLATEthedrivebeforeattemptinganyworkonit.The“STO“functiondoesnotpreventhighvoltagesfrombeing
presentatthedrivepowerterminals.
1
Note : The “STO“ function does not prevent the drive from an unexpected re‐start. As soon as the “STO“inputs receive the
relevantsignalitispossible(subjecttoparametersettings)torestartautomatically,Basedonthis,thefunctionshouldnotbeused
forcarryingoutshort‐termnon‐electricalmachineryop
erations(suchascleaningormaintenancework).
2
Note:Insomeapplicationsadditionalmeasuresmayberequiredtofulfilthesystemssafetyfunctionneeds:the“STO“function
doesnotprovidemotorbraking.Inthecasewheremotorbrakingisrequiredatimedelaysafetyrelayand/oramechanicalbrake
arrangementorsimilarmethodshouldbeadopted,considerationshou
ldbemadeovertherequiredsafetyfunctionwhenbraking
as
thedrivebrakingcircuitalonecannotberelieduponasafailsafemethod.
Whenusingpermanentmagnetmotorsandintheunlikelyeventofamultipleoutputpowerdevicesfailingthenthemotorcould
effectivelyrotatethemotorshaf
tby180/pdegrees(Wherepdenotesnumberofmotorpolepairs).

 Loading...
Loading...
