OptidriveODP‐2UserGuideRevisions1.30
40
www.invertekdrives.com
8ExtendedParameters
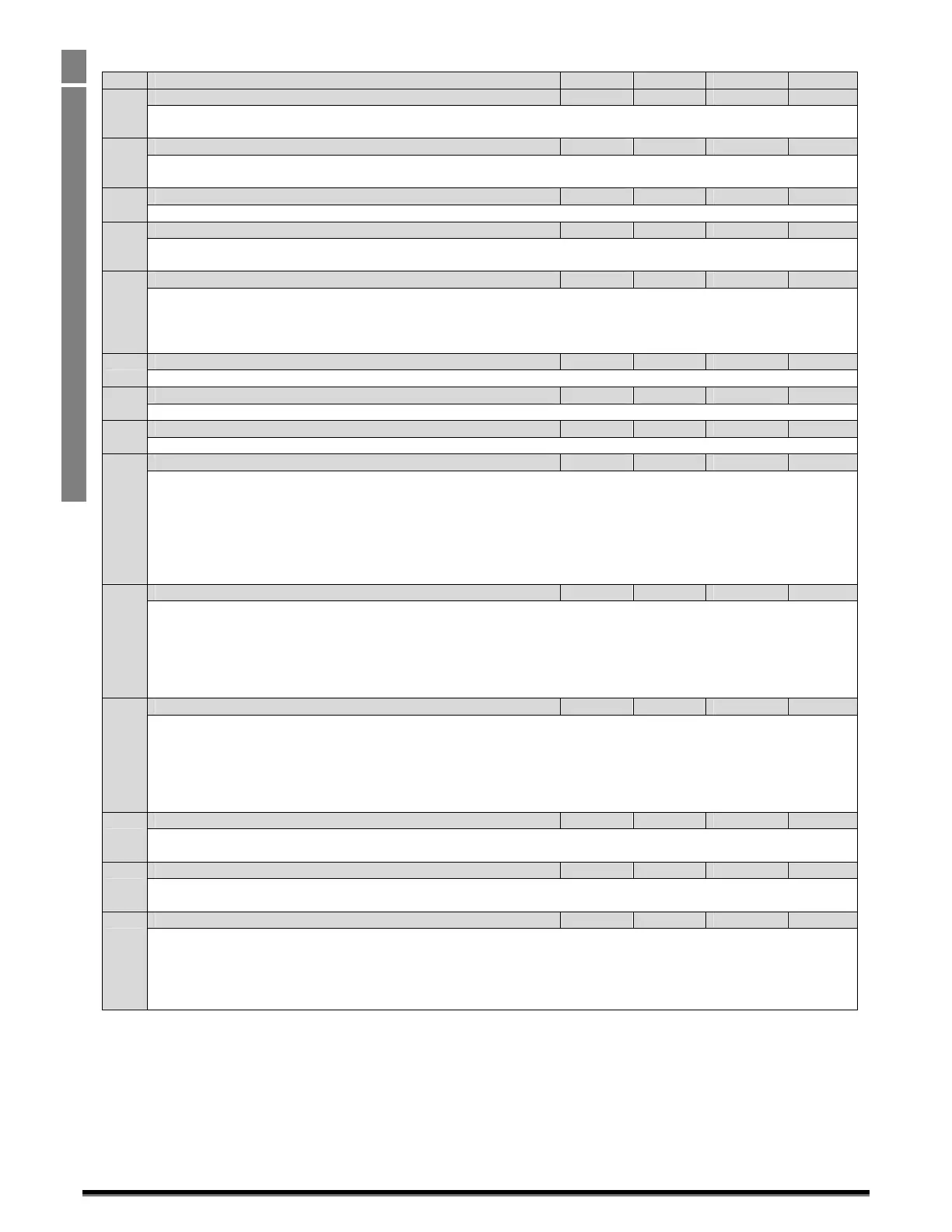
8.2. ParameterGroup3–PIDControl
Par ParameterName Minimum Maximum Default Units
P3‐01 PIDProportionalGain 0.1 30.0 1.0 ‐
PIDControllerProportionalGain.Highervaluesprovideagreaterchangeinthedriveoutputfrequencyinresponsetosmall
changesinthefeedbacksignal.Toohighavaluecancauseinstability
P3‐02 PIDIntegralTimeConstant 0.0 30.0 1.0 s
PIDControllerIntegralTime.Largervaluesprovideamoredampedresponseforsystemswheretheoverallprocessresponds
slowly
P3‐03 PIDDifferentialTimeConstant 0.00 1.00 0.00 s
PIDDifferentialTimeConstant
P3‐04 PIDOperatingMode 0 1 0 ‐
0:DirectOperation. Usethismodeifanincreaseinthemotorspeedshouldresultinanincreaseinthefeedbacksignal
1:InverseOperation.Usethismodeifanincreaseinthemotorspeedshouldresultinadecreaseinthefeedbacksignal
P3‐05 PIDReference(Setpoint)SourceSelect 0 2 0 ‐
SelectsthesourceforthePIDReference/Setpoint
0:DigitalPresetSetpoint.P3‐06isused
1:AnalogInput1Setpoint
2:AnalogInput2Setpoint
P3‐06 PIDDigitalReference(Setpoint) 0.0 100.0 0.0 %
WhenP3‐05=0,thisparametersetsthepresetdigitalreference(setpoint)usedforthePIDController
P3‐07 PIDControllerOutputUpperLimit P3‐08 100.0 100.0 %
LimitsthemaximumvalueoutputfromthePIDcontroller
P3‐08 PIDControllerOutputLowerLimit 0.0 P3‐07 0.0 %
LimitstheminimumoutputfromthePIDcontroller
P3‐09 PIDOutputLimitControl 0 3 0 ‐
0:DigitalOutputLimits.TheoutputrangeofthePIDcontrollerislimitedbythevaluesofP3‐07&P3‐08
1:AnalogInput1ProvidesaVariableUpperLimit.TheoutputrangeofthePIDcontrollerislimitedbythevaluesofP3‐08&the
si
gnalappliedtoAnalogInput1
2:AnalogInput1ProvidesaVariableLowerLimit.TheoutputrangeofthePIDcontrollerislimitedbythesignalappliedto
AnalogInput1&thevalueofP3‐07
3:PIDoutputAddedtoAnalogInput1Value.Theoutputvaluefr
omthePIDControllerisaddedtothespeedreferenceapplied
totheAnalogInput1
P3‐10 PIDFeedbackSignalSourceSelect 0 1 0 ‐
0:AnalogInput2
1:AnalogInput1
2:OutputCurrent
3:DCBusVoltage
4:Differential:AnalogInput1–AnalogInput2
5:LargestValue:AnalogInput1orAnalogInput2
P3‐11 MaximumPIDErrortoEnableRamps 0.0 25.0 0.0 %
DefinesathresholdPIDerrorlevel,wherebyifthedifferencebetweenthesetpointandfeedbackvaluesislessthantheset
threshold,theinternalramptimesofthedrivearedisabled.WhereagreaterPIDerrorexists,theramptimesareenabledtolimit
therateofchangeofmotorspeedonlarg
ePIDerrors,andreactquicklytosmallerrors.
Settingto0.0meansthatthedriverampsarealwaysenabled.Thisparameterisintendedtoallowtheusertodisablethedrive
internalrampswhereafastreactiontothePIDcontrolisrequired,howeverbyonlydisablingtherampswh
enasmallPIDerror
exists,theriskofpossibleovercurrentorovervoltagetripsbeinggeneratedarereduced.
P3‐12 PIDFeedbackValueDisplayScalingFactor 0.000 50.000 0.000 ‐
AppliesascalingfactortothedisplayedPIDfeedback,allowingtheusertodisplaytheactualsignallevelfromatransducer,e.g.0
–10Baretc.
P3‐13 PIDFeedbackWakeUpLevel 0.0 100.0 0.0 %
SetsaprogrammablelevelwherebyifthedriveentersstandbymotorwhilstoperatingunderPIDcontrol,theselectedfeedback
signalmustfallbelowthisthresholdbeforethedrivewillreturntonormaloperation.
P3‐18 PIDOperationControl ‐ ‐ ‐ ‐
0:ContinuousPIDOperation.Inthisoperatingmode,thePIDcontrolleroperatescontinuously,regardlessofwhetherthedrive
isenabledordisabled.ThiscanresultintheoutputofthePIDcontrollerreachingthemaximumlevelpriortothedriveenable
signalbeingapplied.
1:PIDoperationonDriveEn
able.Inthisoperatingmode,thePIDcontrolleronlyoperateswhenthedriveisenabled,andhence
willalwaysstartfromzerowhenthedriveisenabled.
 Loading...
Loading...

